 ทางเข้า
ทางเข้าวงจรเรียงกระแสควบคุมโดยใช้ไทริสเตอร์ วงจรเรียงกระแสแบบปรับได้ของไทริสเตอร์
12.4. หลักการทำงานของวงจรเรียงกระแสที่ใช้ไทริสเตอร์
ลักษณะภายนอกของวงจรเรียงกระแสมีรูปแบบของเส้นโค้งลดลง (ดูรูปที่ 12.6) ดังนั้นการเพิ่มขึ้นของกระแสโหลดทำให้แรงดันเอาต์พุตลดลง ในเวลาเดียวกัน ในการจ่ายไฟให้กับอุปกรณ์ระบบควบคุมจำนวนมาก (มอเตอร์ไฟฟ้า แอมพลิฟายเออร์ ฯลฯ) จำเป็นต้องรักษาแรงดันเอาต์พุตให้อยู่ในระดับที่กำหนดโดยไม่คำนึงถึงกระแสโหลด เพื่อจุดประสงค์นี้ มีการใช้วงจรเรียงกระแสควบคุม (ควบคุม) โดยใช้ไทริสเตอร์ ทรานซิสเตอร์ และอุปกรณ์ควบคุมอื่น ๆ ลักษณะภายนอกของวงจรเรียงกระแสดังกล่าวจะแสดงในรูปที่ 1 12.6 มีเส้นประและใกล้เคียงกับอุดมคติ
สาระสำคัญของการทำงานของวงจรเรียงกระแสที่ควบคุมไทริสเตอร์นั้นพิจารณาโดยใช้ตัวอย่างของวงจรครึ่งคลื่นที่ง่ายที่สุด (รูปที่ 12.7, a) วงจรควบคุมของไทริสเตอร์ VS ให้การเปลี่ยนแปลงในช่วงเวลาของการเปิดเครื่องซึ่งช่วยรักษาค่าเฉลี่ยของแรงดันไฟฟ้าโหลดในระดับที่กำหนดที่ค่าต่าง ๆ ของกระแสโหลด ในกรณีของโหลดที่ใช้งาน Rn ไทริสเตอร์ VS จะถูกปิดโดยอัตโนมัติในเวลาที่แรงดันแอโนดเข้าใกล้ศูนย์ ดังนั้นเมื่อไทริสเตอร์เปิดอยู่ด้วยสัญญาณที่ประมาณโดยมุมเปิดเครื่องอุปกรณ์จะทำงานในโหมดสวิตช์พร้อมเวลาเปิดเครื่อง
โดยที่ T คือคาบการสั่นของแรงดันไฟฟ้าขาเข้า u(t)
เช่น เมื่อ α = 0 เวลา
และไทริสเตอร์ VS เปิดเต็มที่ระหว่างครึ่งคลื่นบวกของแรงดันไฟฟ้า
![]()
ซึ่งสอดคล้องกับการลดเวลาในการเปิดไทริสเตอร์ 1/4 เช่น 25% เป็นต้น
เพื่ออธิบายกลไกการควบคุมของวงจรไทริสเตอร์ในรูป 12.7, b, c, d แสดงไดอะแกรมเวลาของแรงดันไฟฟ้าที่โหลด ที่มุมสวิตชิ่งที่เล็กที่สุดของไทริสเตอร์ α =0 (รูปที่ 12.7, b) แรงดันไฟฟ้าเฉลี่ยทั่วโหลดจะมีค่าสูงสุดสำหรับวงจรครึ่งคลื่น (รูปที่ 12.7, a) เท่ากับ

หากในโหมดโหลดขั้นต่ำ (R n มีขนาดใหญ่ I n.av มีขนาดเล็ก) ตรวจสอบให้แน่ใจว่ามุม α = π/2 (รูปที่ 12.7, d) จากนั้น เมื่อโหลดเพิ่มขึ้น ให้ลดมุมลง α (รูปที่ 12.7, c) จากนั้นจึงเป็นไปได้ที่จะได้รับค่าคงที่ของ U n.av โดยการชดเชยการเพิ่มขึ้นของค่า ∆U av [ดู (12.11)]. หลักการควบคุมวงจรเรียงกระแสไทริสเตอร์นี้เรียกว่าเฟสพัลส์ (แนวตั้ง) และใช้กันอย่างแพร่หลายในตัวแปลงไทริสเตอร์เพื่อวัตถุประสงค์ต่างๆ

ข้าว. 12.7. วงจรเรียงกระแสครึ่งคลื่นพร้อมไทริสเตอร์: a - วงจร (UE - อิเล็กโทรดควบคุม); b, c, d - ไดอะแกรมเวลาของแรงดันไฟฟ้าที่แก้ไขที่มุมต่าง ๆ ของการเปิดไทริสเตอร์
วงจรควบคุมไทริสเตอร์ต้องสร้างพัลส์ควบคุมตามเวลาที่กำหนดซึ่งสอดคล้องกับค่ามุมที่ต้องการ ในเวลาเดียวกัน เพื่อการทำงานที่เชื่อถือได้ของไทริสเตอร์ จำเป็นต้องใช้พัลส์ระยะสั้นที่มีความชันของขอบนำสูง อุปกรณ์ที่ให้การควบคุมมุมการสลับไทริสเตอร์เรียกว่าตัวเปลี่ยนเฟส ตัวเปลี่ยนเฟสหาได้ง่ายโดยใช้หม้อแปลงที่มีองค์ประกอบ R และ L อย่างไรก็ตาม เนื่องจากสัญญาณควบคุมที่สร้างขึ้นมีความลาดเอียงต่ำ จึงไม่ได้ใช้ในวงจรไทริสเตอร์ สิ่งที่เหมาะสมที่สุดสำหรับวัตถุประสงค์เหล่านี้คือตัวเปลี่ยนเฟสของเซมิคอนดักเตอร์ที่มีเครื่องกำเนิดสูงสุดในตัวโดยใช้ไดนิสเตอร์ (ไทริสเตอร์ไดโอด)
วงจรควบคุมพีคออสซิลเลเตอร์ที่ง่ายที่สุดไทริสเตอร์ VS1 แสดงในรูป 12.8 ก. ประกอบด้วยออสซิลเลเตอร์ตัวเองของไดนิสเตอร์ของการสั่นแบบผ่อนคลาย (ตัวเก็บประจุ Su และไดนิสเตอร์ VS2 เชื่อมต่อแบบขนาน) ซึ่งทำหน้าที่เป็นเครื่องกำเนิดพัลส์ควบคุมระยะสั้นสำหรับไทริสเตอร์ VS1 พร้อมกันเนื่องจากการใช้ตัวต้านทาน Ry ในวงจรแอโนดของไดนิสเตอร์ VS2.
ในขณะที่ครึ่งคลื่นบวกของแรงดันไฟจ่าย u(t) การชาร์จของตัวเก็บประจุ C y เริ่มต้นผ่านตัวต้านทานปรับค่า R p กระบวนการนี้ดำเนินต่อไปจนกระทั่งแรงดันไฟฟ้า u C (t) บนตัวเก็บประจุถึงค่า U บน ซึ่งเพียงพอที่จะเปลี่ยนไดนิสเตอร์ VS2 เช่น
จากช่วงเวลานี้ t=t 1 (รูปที่ 12.8, b) ไดนิสเตอร์จะเข้าสู่โหมดความอิ่มตัว (สถานะการนำไฟฟ้า) โดยมีค่าความต้านทานเอาต์พุตที่ต่ำมาก ด้วยเหตุนี้ตัวเก็บประจุ C y จึงถูกปล่อยออกมาผ่านไดนิสเตอร์ VS2 และตัวต้านทาน R y ทำให้เกิดพัลส์กระแสระยะสั้น i y (รูปที่ 12.8, c) ในวงจรควบคุมของไทริสเตอร์ VS1 การสิ้นสุดของเวลาคายประจุจะถูกกำหนดโดยการลดแรงดันไฟฟ้าบนไดนิสเตอร์เป็นค่า U ปิด นั่นคือ โมเมนต์ในเวลา t=t 2 (รูปที่ 12.8, b) ในขณะนี้ dinistor จะสลับกลับไปยังสถานะจุดตัด ตัวเก็บประจุ C y ได้รับโอกาสในการชาร์จอีกครั้งภายใต้อิทธิพลของครึ่งคลื่นถัดไปของแรงดันไฟฟ้า u(t) ที่จ่ายให้กับวงจร เมื่อความต้านทานของตัวต้านทาน R r (รูปที่ 12.8, a) เปลี่ยนแปลงพารามิเตอร์ของวงจรการชาร์จจะเปลี่ยน (τ z = R r С y) ดังนั้นการเปลี่ยนแปลงของพัลส์ควบคุม i y จึงสังเกตได้ทันเวลา (รูปที่. 12.8,ค) สิ่งนี้ช่วยให้คุณเปลี่ยนมุมการสลับของไทริสเตอร์ได้ ดังนั้นจึงมีวิธีพัลส์เฟสสำหรับควบคุมแรงดันเอาต์พุต (ดูรูปที่ 12.7)

ข้าว. 12.8. แผนการควบคุมพีคออสซิลเลเตอร์ของไทริสเตอร์ (a); แผนภาพเวลาของแรงดันไฟฟ้าบนตัวเก็บประจุ (b) และกระแสควบคุมไทริสเตอร์ (c)
หลักการพิจารณาของการควบคุมไทริสเตอร์สามารถใช้ได้กับอุปกรณ์วงจรเรียงกระแสทั้งแบบเฟสเดียวและหลายเฟส
ในวงจรเรียงกระแสที่มีหม้อแปลงที่อินพุต แรงดันไฟฟ้าที่โหลดสามารถควบคุมได้โดยไทริสเตอร์ที่เชื่อมต่อกับวงจรอินพุต AC ดังแสดงในรูป 12.9. วงจรดังกล่าวมีแนวโน้มมากสำหรับวงจรเรียงกระแสที่ใช้หม้อแปลงแบบสเต็ปดาวน์เนื่องจากเมื่อ U 1 >>U 2 เรามี ฉัน 1<

ข้าว. 12.9. วงจรควบคุมวงจรเรียงกระแสไทริสเตอร์แบบเต็มคลื่น
เมื่อพัฒนาแหล่งจ่ายไฟแบบปรับได้โดยไม่ต้องใช้ตัวแปลงความถี่สูงนักพัฒนาต้องเผชิญกับปัญหาที่แรงดันไฟฟ้าเอาต์พุตขั้นต่ำและกระแสโหลดขนาดใหญ่พลังงานจำนวนมากจะกระจายไปโดยโคลงบนองค์ประกอบควบคุม จนถึงขณะนี้ ในกรณีส่วนใหญ่ ปัญหานี้ได้รับการแก้ไขด้วยวิธีนี้: พวกเขาทำการก๊อกหลายครั้งที่ขดลวดทุติยภูมิของหม้อแปลงไฟฟ้าและแบ่งช่วงการปรับแรงดันเอาต์พุตทั้งหมดออกเป็นช่วงย่อยหลายช่วง หลักการนี้ใช้กับอุปกรณ์จ่ายไฟแบบอนุกรมจำนวนมากเช่น UIP-2 และรุ่นที่ทันสมัยกว่า เป็นที่ชัดเจนว่าการใช้แหล่งพลังงานที่มีช่วงย่อยหลายช่วงมีความซับซ้อนมากขึ้นและการควบคุมแหล่งพลังงานดังกล่าวจากระยะไกลเช่นจากคอมพิวเตอร์ก็มีความซับซ้อนมากขึ้นเช่นกัน
สำหรับฉันแล้วดูเหมือนว่าวิธีแก้ปัญหาคือการใช้วงจรเรียงกระแสแบบควบคุมบนไทริสเตอร์เนื่องจากมีความเป็นไปได้ที่จะสร้างแหล่งพลังงานที่ควบคุมโดยปุ่มเดียวสำหรับการตั้งค่าแรงดันเอาต์พุตหรือโดยสัญญาณควบคุมเดียวที่มีช่วงการปรับแรงดันเอาต์พุตจากศูนย์ (หรือ เกือบจากศูนย์) ถึงค่าสูงสุด แหล่งพลังงานดังกล่าวสามารถผลิตจากชิ้นส่วนที่มีจำหน่ายทั่วไป
จนถึงปัจจุบัน วงจรเรียงกระแสแบบควบคุมที่มีไทริสเตอร์ได้รับการอธิบายอย่างละเอียดในหนังสือเกี่ยวกับแหล่งจ่ายไฟ แต่ในทางปฏิบัติแล้ว วงจรเรียงกระแสเหล่านี้ไม่ค่อยได้ใช้ในแหล่งจ่ายไฟในห้องปฏิบัติการ พวกเขายังไม่ค่อยพบในการออกแบบมือสมัครเล่น (ยกเว้นแน่นอนสำหรับเครื่องชาร์จแบตเตอรี่รถยนต์) ฉันหวังว่างานนี้จะช่วยเปลี่ยนแปลงสถานการณ์นี้
ตามหลักการแล้ว วงจรที่อธิบายไว้ ณ ที่นี้สามารถใช้เพื่อรักษาเสถียรภาพแรงดันไฟฟ้าขาเข้าของตัวแปลงความถี่สูงได้ เช่น ดังที่ทำในทีวี "Electronics Ts432" วงจรที่แสดงที่นี่สามารถใช้เพื่อผลิตแหล่งจ่ายไฟหรือเครื่องชาร์จในห้องปฏิบัติการได้
ฉันให้คำอธิบายเกี่ยวกับงานของฉันไม่ใช่ตามลำดับที่ฉันดำเนินการ แต่ในลักษณะที่เป็นระเบียบไม่มากก็น้อย มาดูปัญหาทั่วไปก่อน จากนั้นจึงออกแบบ "แรงดันไฟฟ้าต่ำ" เช่น อุปกรณ์จ่ายไฟสำหรับวงจรทรานซิสเตอร์หรือแบตเตอรี่ชาร์จ และจากนั้นจึงเลือกวงจรเรียงกระแส "ไฟฟ้าแรงสูง" สำหรับจ่ายไฟให้กับวงจรหลอดสุญญากาศ
การทำงานของวงจรเรียงกระแสไทริสเตอร์ที่มีโหลดแบบคาปาซิทีฟ
วรรณกรรมนี้อธิบายถึงตัวควบคุมกำลังไทริสเตอร์จำนวนมากที่ทำงานบนกระแสสลับหรือกระแสเต้นเป็นจังหวะด้วยตัวต้านทาน (เช่น หลอดไส้) หรือโหลดอุปนัย (เช่น มอเตอร์ไฟฟ้า) โหลดของวงจรเรียงกระแสมักจะเป็นตัวกรองที่ใช้ตัวเก็บประจุเพื่อทำให้ระลอกคลื่นเรียบ ดังนั้นโหลดของวงจรเรียงกระแสจึงสามารถเป็นตัวเก็บประจุได้ตามธรรมชาติ
ลองพิจารณาการทำงานของวงจรเรียงกระแสที่มีตัวควบคุมไทริสเตอร์สำหรับโหลดตัวต้านทาน - คาปาซิเตอร์ แผนภาพของตัวควบคุมดังกล่าวแสดงไว้ในรูปที่ 1 1.
ข้าว. 1.
ตัวอย่างเช่นที่นี่จะแสดงวงจรเรียงกระแสแบบเต็มคลื่นที่มีจุดกึ่งกลาง แต่ก็สามารถทำได้โดยใช้วงจรอื่นเช่นสะพาน บางครั้งไทริสเตอร์นอกเหนือจากการควบคุมแรงดันไฟฟ้าที่โหลดแล้วคุณ นอกจากนี้ยังทำหน้าที่ของส่วนประกอบเรียงกระแส (วาล์ว) อย่างไรก็ตาม โหมดนี้ไม่ได้รับอนุญาตสำหรับไทริสเตอร์ทั้งหมด (ไทริสเตอร์ KU202 ที่มีตัวอักษรบางตัวอนุญาตให้ทำงานเป็นวาล์ว) เพื่อความชัดเจนในการนำเสนอ เราถือว่าไทริสเตอร์ใช้เพื่อควบคุมแรงดันไฟฟ้าตกคร่อมโหลดเท่านั้นคุณ และการยืดผมทำได้โดยอุปกรณ์อื่น
หลักการทำงานของตัวควบคุมแรงดันไฟฟ้าไทริสเตอร์แสดงไว้ในรูปที่ 1 2. ที่เอาต์พุตของวงจรเรียงกระแส (จุดเชื่อมต่อของแคโทดของไดโอดในรูปที่ 1) จะได้รับพัลส์แรงดันไฟฟ้า (ครึ่งคลื่นล่างของคลื่นไซน์จะ "หมุน" ขึ้น) กำหนดคุณถูกต้อง - ความถี่ระลอกคลื่นฉพี ที่เอาต์พุตของวงจรเรียงกระแสแบบเต็มคลื่นจะเท่ากับสองเท่าของความถี่เครือข่ายคือ 100เฮิรตซ์ เมื่อจ่ายไฟจากแหล่งจ่ายไฟหลัก 50เฮิรตซ์ - วงจรควบคุมจ่ายพัลส์กระแส (หรือแสงสว่างหากใช้ออปโตไทริสเตอร์) โดยมีการหน่วงเวลาที่แน่นอนไปยังอิเล็กโทรดควบคุมไทริสเตอร์เสื้อ สัมพันธ์กับจุดเริ่มต้นของช่วงการเต้นเป็นจังหวะเช่น ช่วงเวลาที่แรงดันไฟฟ้าของวงจรเรียงกระแสคุณถูกต้อง กลายเป็นศูนย์

ข้าว. 2.
รูปที่ 2 เป็นกรณีเกิดความล่าช้าเสื้อ เกินครึ่งหนึ่งของระยะเวลาการเต้นเป็นจังหวะ ในกรณีนี้ วงจรจะทำงานในส่วนตกกระทบของคลื่นไซน์ ยิ่งหน่วงเวลาเปิดไทริสเตอร์นานขึ้น แรงดันไฟฟ้าที่แก้ไขก็จะยิ่งต่ำลงคุณ เมื่อโหลด โหลดระลอกแรงดันไฟฟ้าคุณ ปรับให้เรียบด้วยตัวเก็บประจุตัวกรองซี เอฟ - ที่นี่และด้านล่าง มีการลดความซับซ้อนบางประการเมื่อพิจารณาการทำงานของวงจร: ความต้านทานเอาต์พุตของหม้อแปลงไฟฟ้าถือว่าเท่ากับศูนย์, แรงดันไฟฟ้าตกคร่อมไดโอดเรียงกระแสจะไม่ถูกนำมาพิจารณาและเวลาเปิดเครื่องไทริสเตอร์คือ ไม่ได้นำมาพิจารณา ปรากฎว่าชาร์จความจุตัวกรองใหม่ซี เอฟ เกิดขึ้นราวกับเกิดขึ้นทันที ในความเป็นจริง หลังจากใช้พัลส์ทริกเกอร์กับอิเล็กโทรดควบคุมของไทริสเตอร์ การชาร์จตัวเก็บประจุตัวกรองจะใช้เวลาระยะหนึ่ง ซึ่งโดยปกติแล้วจะน้อยกว่าระยะเวลาการเต้นเป็นจังหวะ Tp มาก
ตอนนี้ลองจินตนาการว่าความล่าช้าในการเปิดไทริสเตอร์เสื้อ เท่ากับครึ่งหนึ่งของระยะเวลาการเต้นเป็นจังหวะ (ดูรูปที่ 3) จากนั้นไทริสเตอร์จะเปิดขึ้นเมื่อแรงดันไฟฟ้าที่เอาต์พุตของวงจรเรียงกระแสผ่านค่าสูงสุด

ข้าว. 3.
ในกรณีนี้คือแรงดันโหลดคุณ ก็จะใหญ่ที่สุดเช่นกัน โดยประมาณเหมือนกับว่าไม่มีตัวควบคุมไทริสเตอร์ในวงจร (เราละเลยแรงดันตกคร่อมไทริสเตอร์แบบเปิด)
นี่คือจุดที่เราประสบปัญหา สมมติว่าเราต้องการควบคุมแรงดันไฟฟ้าโหลดจากเกือบศูนย์ถึงค่าสูงสุดที่สามารถหาได้จากหม้อแปลงไฟฟ้าที่มีอยู่ ในการทำเช่นนี้โดยคำนึงถึงสมมติฐานที่ทำไว้ก่อนหน้านี้ จำเป็นต้องใช้พัลส์ทริกเกอร์กับไทริสเตอร์อย่างแน่นอนในเวลาที่คุณถูกต้อง ผ่านสูงสุดเช่นเสื้อ z = ที หน้า /2. โดยคำนึงถึงความจริงที่ว่าไทริสเตอร์ไม่เปิดทันที แต่ชาร์จประจุตัวเก็บประจุตัวกรองใหม่ซี เอฟ ยังต้องใช้เวลาพอสมควร โดยจะต้องส่งพัลส์ที่กระตุ้นเร็วกว่าครึ่งหนึ่งของระยะเวลาการเต้นเป็นจังหวะ กล่าวคือเสื้อ< T п /2. ปัญหาคือประการแรกเป็นการยากที่จะบอกว่าเร็วแค่ไหนเนื่องจากขึ้นอยู่กับปัจจัยที่ยากต่อการคำนึงถึงอย่างแม่นยำเมื่อคำนวณเช่นเวลาเปิดเครื่องของอินสแตนซ์ไทริสเตอร์ที่กำหนดหรือทั้งหมด (รับ พิจารณาความเหนี่ยวนำ) ความต้านทานเอาต์พุตของหม้อแปลงไฟฟ้ากำลัง ประการที่สองแม้ว่าวงจรจะถูกคำนวณและปรับอย่างแม่นยำ แต่เวลาหน่วงเวลาในการเปิดเครื่องเสื้อ ความถี่เครือข่าย ดังนั้นความถี่และระยะเวลาทีพี ระลอกคลื่น เวลาเปิดไทริสเตอร์ และพารามิเตอร์อื่นๆ อาจเปลี่ยนแปลงเมื่อเวลาผ่านไป ดังนั้นเพื่อให้ได้แรงดันไฟฟ้าสูงสุดที่โหลดคุณ มีความปรารถนาที่จะเปิดไทริสเตอร์เร็วกว่าครึ่งหนึ่งของช่วงการเต้นเป็นจังหวะ
สมมติว่าเราทำแบบนั้น เช่น เราตั้งเวลาหน่วงไว้เสื้อ น้อยกว่ามาก T p /2 กราฟที่แสดงลักษณะการทำงานของวงจรในกรณีนี้จะแสดงในรูปที่ 1 4. โปรดทราบว่าหากไทริสเตอร์เปิดก่อนครึ่งรอบครึ่ง มันจะยังคงอยู่ในสถานะเปิดจนกว่ากระบวนการชาร์จตัวเก็บประจุตัวกรองจะเสร็จสิ้นซี เอฟ (ดูชีพจรแรกในรูปที่ 4)

ข้าว. 4.
ปรากฎว่าเป็นเวลาหน่วงเวลาอันสั้นเสื้อ ความผันผวนของแรงดันเอาต์พุตของตัวควบคุมอาจเกิดขึ้นได้ สิ่งเหล่านี้เกิดขึ้นหากในขณะที่ชีพจรทริกเกอร์ถูกนำไปใช้กับไทริสเตอร์แรงดันไฟฟ้าของโหลดคุณ มีแรงดันไฟฟ้ามากขึ้นที่เอาต์พุตของวงจรเรียงกระแสคุณถูกต้อง - ในกรณีนี้ไทริสเตอร์อยู่ภายใต้แรงดันย้อนกลับและไม่สามารถเปิดได้ภายใต้อิทธิพลของพัลส์ทริกเกอร์ อาจพลาดพัลส์ทริกเกอร์ตั้งแต่หนึ่งพัลส์ขึ้นไป (ดูพัลส์ที่สองในรูปที่ 4) การเปิดไทริสเตอร์ครั้งถัดไปจะเกิดขึ้นเมื่อตัวเก็บประจุตัวกรองถูกคายประจุ และในขณะที่ใช้พัลส์ควบคุม ไทริสเตอร์จะอยู่ภายใต้แรงดันไฟฟ้าโดยตรง
กรณีที่อันตรายที่สุดคือจังหวะพลาดทุกวินาที ในกรณีนี้กระแสตรงจะไหลผ่านขดลวดของหม้อแปลงไฟฟ้าภายใต้อิทธิพลที่หม้อแปลงอาจล้มเหลว
เพื่อหลีกเลี่ยงการปรากฏตัวของกระบวนการสั่นในวงจรควบคุมไทริสเตอร์อาจเป็นไปได้ที่จะละทิ้งการควบคุมพัลส์ของไทริสเตอร์ แต่ในกรณีนี้วงจรควบคุมจะซับซ้อนมากขึ้นหรือไม่ประหยัด ดังนั้น ผู้เขียนจึงได้พัฒนาวงจรควบคุมไทริสเตอร์ ซึ่งโดยปกติไทริสเตอร์จะถูกกระตุ้นโดยพัลส์ควบคุม และไม่มีกระบวนการสั่นเกิดขึ้น แผนภาพดังกล่าวแสดงในรูปที่. 5.

ข้าว. 5.
ที่นี่ไทริสเตอร์ถูกโหลดไปที่ความต้านทานเริ่มต้นรพี และตัวเก็บประจุตัวกรองซี อาร์ เอ็น เชื่อมต่อผ่านไดโอดสตาร์ทวีดีพี - ในวงจรดังกล่าว ไทริสเตอร์จะเริ่มทำงานโดยไม่คำนึงถึงแรงดันไฟฟ้าบนตัวเก็บประจุตัวกรองซี เอฟ หลังจากใช้พัลส์ทริกเกอร์กับไทริสเตอร์ กระแสแอโนดของมันจะเริ่มผ่านความต้านทานของทริกเกอร์ก่อนรพี และเมื่อแรงดันไฟฟ้าเปิดอยู่รพี จะเกินแรงดันโหลดคุณ ไดโอดสตาร์ทจะเปิดขึ้นวีดีพี และกระแสแอโนดของไทริสเตอร์จะชาร์จตัวเก็บประจุตัวกรองอีกครั้งซี เอฟ. ความต้านทาน R p ค่าดังกล่าวถูกเลือกเพื่อให้แน่ใจว่าไทริสเตอร์สตาร์ทได้อย่างเสถียรโดยมีเวลาหน่วงขั้นต่ำของพัลส์ทริกเกอร์เสื้อ - เห็นได้ชัดว่ากำลังบางส่วนสูญเสียไปอย่างไร้ประโยชน์ที่แนวต้านเริ่มต้น ดังนั้นในวงจรข้างต้นควรใช้ไทริสเตอร์ที่มีกระแสไฟค้างต่ำจากนั้นจะสามารถใช้ความต้านทานเริ่มต้นสูงและลดการสูญเสียพลังงานได้
โครงการในรูป 5 มีข้อเสียที่กระแสโหลดผ่านไดโอดเพิ่มเติมวีดีพี ซึ่งส่วนหนึ่งของแรงดันไฟฟ้าที่แก้ไขจะสูญเสียไปอย่างไร้ประโยชน์ ข้อเสียเปรียบนี้สามารถกำจัดได้โดยการเชื่อมต่อตัวต้านทานเริ่มต้นรพี ไปยังวงจรเรียงกระแสที่แยกจากกัน วงจรที่มีวงจรเรียงกระแสควบคุมแยกต่างหาก ซึ่งใช้วงจรสตาร์ทและความต้านทานสตาร์ทรพี แสดงในรูป 6. ในวงจรนี้ ไดโอดเรียงกระแสควบคุมสามารถใช้พลังงานต่ำได้ เนื่องจากกระแสโหลดจะไหลผ่านตัวเรียงกระแสกำลังเท่านั้น

ข้าว. 6.
อุปกรณ์จ่ายไฟแรงดันต่ำพร้อมตัวควบคุมไทริสเตอร์
ด้านล่างนี้เป็นคำอธิบายของการออกแบบวงจรเรียงกระแสแรงดันต่ำหลายแบบพร้อมตัวควบคุมไทริสเตอร์ เมื่อสร้างพวกมันฉันใช้วงจรควบคุมไทริสเตอร์ที่ใช้ในอุปกรณ์ชาร์จแบตเตอรี่รถยนต์เป็นพื้นฐาน (ดูรูปที่ 7) โครงการนี้ประสบความสำเร็จโดยสหายผู้ล่วงลับของฉัน A.G. Spiridonov

ข้าว. 7.
องค์ประกอบที่วงกลมในแผนภาพ (รูปที่ 7) ได้รับการติดตั้งบนแผงวงจรพิมพ์ขนาดเล็ก มีการอธิบายโครงร่างที่คล้ายกันหลายประการในวรรณคดี ความแตกต่างระหว่างโครงร่างเหล่านี้มีน้อยมาก ส่วนใหญ่อยู่ที่ประเภทและการจัดอันดับของชิ้นส่วน ความแตกต่างที่สำคัญคือ:
1. มีการใช้ตัวเก็บประจุไทม์มิ่งที่มีความจุต่างกันเช่น แทน 0.5มเอฟ ใส่ 1 มเอฟ และด้วยเหตุนี้ จึงมีความต้านทานที่แปรผันได้ซึ่งมีค่าต่างกัน เพื่อให้ไทริสเตอร์สตาร์ทในวงจรได้อย่างน่าเชื่อถือ ฉันใช้ตัวเก็บประจุ 1 ตัวมเอฟ
2. คุณไม่จำเป็นต้องติดตั้งตัวต้านทานแบบขนานกับตัวเก็บประจุเวลา (3เค วในรูป 7). เห็นได้ชัดว่าในกรณีนี้อาจไม่จำเป็นต้องมีความต้านทานแบบแปรผันภายใน 15เค วแต่มีขนาดที่แตกต่างกัน ฉันยังไม่พบอิทธิพลของความต้านทานขนานกับตัวเก็บประจุเวลาที่มีต่อเสถียรภาพของวงจร
3. วงจรส่วนใหญ่ที่อธิบายไว้ในเอกสารใช้ทรานซิสเตอร์ประเภท KT315 และ KT361 บางครั้งมันก็ล้มเหลวดังนั้นในวงจรของฉันฉันใช้ทรานซิสเตอร์ที่ทรงพลังกว่าประเภท KT816 และ KT817
4. ไปยังจุดเชื่อมต่อฐานตัวสะสม pnp และ npn ทรานซิสเตอร์สามารถเชื่อมต่อตัวแบ่งความต้านทานที่มีค่าต่างกันได้ (10เค วและ 12 ก วในรูป 7).
5. สามารถติดตั้งไดโอดในวงจรอิเล็กโทรดควบคุมไทริสเตอร์ได้ (ดูแผนภาพด้านล่าง) ไดโอดนี้จะช่วยลดอิทธิพลของไทริสเตอร์ที่มีต่อวงจรควบคุม
ไดอะแกรม (รูปที่ 7) แสดงไว้เป็นตัวอย่าง ไดอะแกรมที่คล้ายกันหลายอันพร้อมคำอธิบายสามารถพบได้ในหนังสือ“ เครื่องชาร์จและเครื่องชาร์จสตาร์ท: การตรวจสอบข้อมูลสำหรับผู้ที่ชื่นชอบรถยนต์ / คอมพ์ A. G. Khodasevich, T. I. Khodasevich -M.:NT Press, 2005” หนังสือเล่มนี้ประกอบด้วยสามส่วนซึ่งมีที่ชาร์จเกือบทั้งหมดในประวัติศาสตร์ของมนุษยชาติ
วงจรเรียงกระแสที่ง่ายที่สุดพร้อมตัวควบคุมแรงดันไฟฟ้าไทริสเตอร์จะแสดงในรูปที่ 1 8.

ข้าว. 8.
วงจรนี้ใช้วงจรเรียงกระแสจุดกึ่งกลางแบบเต็มคลื่นเนื่องจากมีไดโอดน้อยกว่า ดังนั้นจึงจำเป็นต้องใช้ฮีทซิงค์น้อยลงและมีประสิทธิภาพสูงกว่า หม้อแปลงไฟฟ้ากำลังมีขดลวดทุติยภูมิ 2 เส้นสำหรับแรงดันไฟฟ้ากระแสสลับ 15วี - วงจรควบคุมไทริสเตอร์ที่นี่ประกอบด้วยตัวเก็บประจุ C1 ความต้านทาน R 1- R 6, ทรานซิสเตอร์ VT 1 และ VT 2, ไดโอด VD 3
พิจารณาการทำงานของวงจร ตัวเก็บประจุ C1 ถูกชาร์จผ่านความต้านทานแบบแปรผัน R 2 และค่าคงที่ R 1. เมื่อเกิดแรงดันไฟฟ้าที่ตัวเก็บประจุค 1 จะเกินแรงดันไฟฟ้าที่จุดต่อความต้านทานอาร์ 4 และ อาร์ 5 ทรานซิสเตอร์เปิดเวอร์มอนต์ 1. กระแสสะสมทรานซิสเตอร์ VT 1 เปิด VT 2. ในทางกลับกันกระแสสะสม VT 2 เปิด VT 1. ดังนั้น ทรานซิสเตอร์จึงเปิดเหมือนหิมะถล่มและตัวเก็บประจุจะคายประจุค อิเล็กโทรดควบคุมไทริสเตอร์ 1 V VS 1. สิ่งนี้จะสร้างแรงกระตุ้นที่กระตุ้น เปลี่ยนแปลงตามความต้านทานแปรผันร 2 ทริกเกอร์เวลาหน่วงพัลส์, แรงดันไฟฟ้าขาออกของวงจรสามารถปรับได้ ยิ่งมีความต้านทานมากเท่าใดประจุของตัวเก็บประจุก็จะยิ่งช้าลงเท่านั้นค 1 เวลาหน่วงพัลส์ของทริกเกอร์จะนานขึ้นและแรงดันเอาต์พุตที่โหลดต่ำกว่า
ความต้านทานอย่างต่อเนื่องร 1 เชื่อมต่ออนุกรมกับตัวแปรร 2 จำกัดเวลาหน่วงพัลส์ขั้นต่ำ หากลดลงอย่างมาก ให้ไปที่ตำแหน่งต่ำสุดของความต้านทานตัวแปรร 2 แรงดันขาออกจะหายไปทันที นั่นเป็นเหตุผลร 1 ถูกเลือกในลักษณะที่ทำให้วงจรทำงานได้อย่างเสถียรร 2 ในตำแหน่งความต้านทานขั้นต่ำ (สอดคล้องกับแรงดันเอาต์พุตสูงสุด)
วงจรใช้ความต้านทาน R5 กำลัง 1 วัตต์ เพียงเพราะมันมาถึงมือแล้ว คงจะพอติดตั้งได้ R5 กำลัง 0.5 วัตต์
ความต้านทานอาร์ มีการติดตั้งหมายเลข 3 เพื่อขจัดอิทธิพลของการรบกวนต่อการทำงานของวงจรควบคุม หากไม่มีวงจรดังกล่าว วงจรจะทำงานได้ แต่มีความไวต่อการสัมผัสที่ขั้วของทรานซิสเตอร์
ไดโอด วีดี 3 กำจัดอิทธิพลของไทริสเตอร์บนวงจรควบคุม ฉันทดสอบผ่านประสบการณ์และเชื่อมั่นว่าเมื่อใช้ไดโอด วงจรจะมีเสถียรภาพมากขึ้น กล่าวโดยสรุปคือไม่จำเป็นต้องละทิ้งการติดตั้ง D226 ได้ง่ายกว่าซึ่งมีปริมาณสำรองไม่หมดและสร้างอุปกรณ์ที่ทำงานได้อย่างน่าเชื่อถือ
ความต้านทานอาร์ 6 ในวงจรอิเล็กโทรดควบคุมไทริสเตอร์ VS 1 เพิ่มความน่าเชื่อถือของการทำงาน บางครั้งความต้านทานนี้ถูกกำหนดเป็นค่าที่มากขึ้นหรือไม่ตั้งค่าเลย โดยปกติวงจรจะทำงานโดยไม่มีมัน แต่ไทริสเตอร์สามารถเปิดได้เองเนื่องจากการรบกวนและการรั่วไหลในวงจรอิเล็กโทรดควบคุม ฉันได้ติดตั้งแล้ว R6 ไซส์ 51 วตามที่แนะนำในข้อมูลอ้างอิงสำหรับไทริสเตอร์ KU202
ความต้านทาน R 7 และไดโอด VD 4 ให้การสตาร์ทไทริสเตอร์ที่เชื่อถือได้โดยมีระยะเวลาหน่วงสั้นๆ ของพัลส์ทริกเกอร์ (ดูรูปที่ 5 และคำอธิบาย)
ตัวเก็บประจุ C 2 ทำให้แรงดันไฟฟ้ากระเพื่อมที่เอาต์พุตของวงจรเรียบขึ้น
มีการใช้หลอดไฟจากไฟหน้ารถเป็นโหลดระหว่างการทดลองกับตัวควบคุม
วงจรที่มีวงจรเรียงกระแสแยกต่างหากสำหรับจ่ายไฟให้กับวงจรควบคุมและการสตาร์ทไทริสเตอร์จะแสดงในรูปที่ 1 9.

ข้าว. 9.
ข้อดีของโครงร่างนี้คือจำนวนไดโอดกำลังน้อยกว่าที่ต้องติดตั้งบนหม้อน้ำ โปรดทราบว่าไดโอด D242 ของวงจรเรียงกระแสกำลังเชื่อมต่อด้วยแคโทดและสามารถติดตั้งบนหม้อน้ำทั่วไปได้ ขั้วบวกของไทริสเตอร์ที่เชื่อมต่อกับร่างกายนั้นเชื่อมต่อกับ "ลบ" ของโหลด
แผนภาพการเดินสายของวงจรเรียงกระแสควบคุมเวอร์ชันนี้แสดงไว้ในรูปที่ 1 10.

ข้าว. 10.
สามารถใช้เพื่อทำให้ระลอกคลื่นแรงดันเอาต์พุตเรียบขึ้นแอล.ซี. -กรอง. แผนภาพของวงจรเรียงกระแสแบบควบคุมพร้อมตัวกรองดังกล่าวแสดงในรูปที่ 1 สิบเอ็ด

ข้าว. สิบเอ็ด
ฉันสมัครอย่างแน่นอนแอล.ซี. -กรองด้วยเหตุผลดังต่อไปนี้:
1. ทนทานต่อการโอเวอร์โหลดได้ดีกว่า ฉันกำลังพัฒนาวงจรสำหรับแหล่งจ่ายไฟในห้องปฏิบัติการ ดังนั้นจึงอาจเกิดการโอเวอร์โหลดได้ค่อนข้างมาก ฉันสังเกตว่าแม้ว่าคุณจะสร้างวงจรป้องกันบางอย่าง แต่มันก็จะมีเวลาตอบสนองบ้าง ในช่วงเวลานี้ แหล่งพลังงานไม่ควรล้มเหลว
2. หากคุณสร้างตัวกรองทรานซิสเตอร์ แรงดันไฟฟ้าบางส่วนจะตกคร่อมทรานซิสเตอร์อย่างแน่นอน ดังนั้นประสิทธิภาพจึงต่ำ และทรานซิสเตอร์อาจต้องใช้ฮีทซิงค์
ตัวกรองใช้โช้คอนุกรม D255V
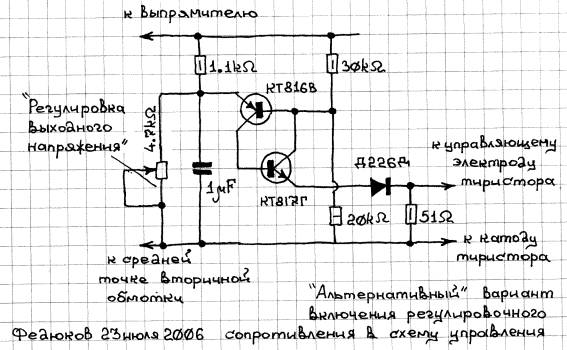
ลองพิจารณาการปรับเปลี่ยนวงจรควบคุมไทริสเตอร์ที่เป็นไปได้ อันแรกแสดงไว้ในรูปที่. 12.
ข้าว. 12.
โดยทั่วไปแล้ว วงจรไทม์มิ่งของตัวควบคุมไทริสเตอร์ทำจากตัวเก็บประจุไทม์มิ่งและความต้านทานแบบแปรผันที่เชื่อมต่อเป็นอนุกรม บางครั้งก็สะดวกในการสร้างวงจรเพื่อให้ขั้วหนึ่งของความต้านทานตัวแปรเชื่อมต่อกับ "ลบ" ของวงจรเรียงกระแส จากนั้นคุณสามารถเปิดความต้านทานแปรผันขนานกับตัวเก็บประจุได้ดังรูปที่ 12 เมื่อเครื่องยนต์อยู่ในตำแหน่งที่ต่ำกว่าตามวงจรส่วนหลักของกระแสที่ไหลผ่านความต้านทาน 1.1เค วเข้าสู่ไทม์มิ่งคาปาซิเตอร์ตัวที่ 1มF และชาร์จอย่างรวดเร็ว ในกรณีนี้ไทริสเตอร์เริ่มต้นที่ "ยอด" ของการเต้นของแรงดันไฟฟ้าที่แก้ไขหรือเร็วกว่านั้นเล็กน้อยและแรงดันเอาต์พุตของตัวควบคุมจะสูงที่สุด หากเครื่องยนต์อยู่ในตำแหน่งบนของวงจร ตัวเก็บประจุไทม์มิ่งจะลัดวงจร และแรงดันไฟฟ้าที่อยู่บนมอเตอร์จะไม่เปิดทรานซิสเตอร์เลย ในกรณีนี้แรงดันเอาต์พุตจะเป็นศูนย์ ด้วยการเปลี่ยนตำแหน่งของมอเตอร์ต้านทานแบบแปรผัน คุณสามารถเปลี่ยนความแรงของกระแสที่ชาร์จตัวเก็บประจุไทม์มิ่ง และเวลาหน่วงของพัลส์ทริกเกอร์ได้
บางครั้งจำเป็นต้องควบคุมตัวควบคุมไทริสเตอร์โดยไม่ได้ใช้ความต้านทานแบบแปรผัน แต่จากวงจรอื่น (รีโมทคอนโทรลควบคุมจากคอมพิวเตอร์) มันเกิดขึ้นที่ชิ้นส่วนของตัวควบคุมไทริสเตอร์อยู่ภายใต้ไฟฟ้าแรงสูงและการเชื่อมต่อโดยตรงกับชิ้นส่วนเหล่านั้นเป็นอันตราย ในกรณีเหล่านี้ สามารถใช้ออปโตคัปเปลอร์แทนความต้านทานแบบแปรผันได้

ข้าว. 13.
ตัวอย่างของการเชื่อมต่อออปโตคัปเปลอร์กับวงจรควบคุมไทริสเตอร์จะแสดงในรูปที่ 1 13. ใช้ออปโตคัปเปลอร์ทรานซิสเตอร์ประเภท 4 ที่นี่เอ็น 35. ฐานของโฟโตทรานซิสเตอร์ (พิน 6) เชื่อมต่อผ่านความต้านทานต่อตัวปล่อย (พิน 4) ความต้านทานนี้จะกำหนดค่าสัมประสิทธิ์การส่งผ่านของออปโตคัปเปลอร์ความเร็วและความต้านทานต่อการเปลี่ยนแปลงของอุณหภูมิ ผู้เขียนทดสอบตัวควบคุมด้วยความต้านทาน 100 ที่ระบุในแผนภาพเค วในขณะที่การพึ่งพาแรงดันเอาต์พุตกับอุณหภูมิกลายเป็นลบนั่นคือเมื่อออปโตคัปเปลอร์ได้รับความร้อนสูง (ฉนวนโพลีไวนิลคลอไรด์ของสายไฟละลาย) แรงดันเอาต์พุตลดลง อาจเป็นเพราะเอาต์พุต LED ลดลงเมื่อถูกความร้อน ผู้เขียนขอบคุณ S. Balashov สำหรับคำแนะนำเกี่ยวกับการใช้ออปโตคัปเปลอร์ของทรานซิสเตอร์

ข้าว. 14.
เมื่อทำการปรับวงจรควบคุมไทริสเตอร์ บางครั้งการปรับเกณฑ์การทำงานของทรานซิสเตอร์ก็มีประโยชน์ ตัวอย่างของการปรับดังกล่าวแสดงไว้ในรูปที่ 14.
ลองพิจารณาตัวอย่างวงจรที่มีตัวควบคุมไทริสเตอร์สำหรับแรงดันไฟฟ้าที่สูงกว่า (ดูรูปที่ 15) วงจรนี้ใช้พลังงานจากขดลวดทุติยภูมิของหม้อแปลงไฟฟ้า TSA-270-1 โดยให้แรงดันไฟฟ้ากระแสสลับที่ 32วี - พิกัดชิ้นส่วนที่ระบุในแผนภาพถูกเลือกสำหรับแรงดันไฟฟ้านี้

ข้าว. 15.
โครงการในรูป 15 ช่วยให้คุณปรับแรงดันเอาต์พุตได้อย่างราบรื่นตั้งแต่ 5วีถึง 40 โวลต์ ซึ่งเพียงพอสำหรับอุปกรณ์เซมิคอนดักเตอร์ส่วนใหญ่ ดังนั้นวงจรนี้จึงสามารถใช้เป็นพื้นฐานสำหรับการผลิตแหล่งจ่ายไฟในห้องปฏิบัติการได้
ข้อเสียของวงจรนี้คือความจำเป็นในการกระจายพลังงานที่ความต้านทานเริ่มต้นค่อนข้างมากร 7. เห็นได้ชัดว่ายิ่งกระแสไทริสเตอร์ที่ถืออยู่ต่ำลง ค่าก็จะยิ่งมากขึ้น และกำลังของความต้านทานเริ่มต้นก็จะยิ่งต่ำลงร 7. ดังนั้นจึงควรใช้ไทริสเตอร์ที่มีกระแสไฟค้างต่ำที่นี่
นอกจากไทริสเตอร์แบบธรรมดาแล้ว ออปโตไทริสเตอร์ยังสามารถใช้ในวงจรควบคุมไทริสเตอร์ได้ ในรูป 16. แสดงแผนภาพด้วยออปโตไทริสเตอร์ TO125-10

ข้าว. 16.
ที่นี่ออพโตไทริสเตอร์เปิดอยู่แทนที่จะเป็นแบบปกติ แต่ตั้งแต่นั้นมา โฟโตไทริสเตอร์และไฟ LED แยกจากกัน วงจรสำหรับใช้ในตัวควบคุมไทริสเตอร์อาจแตกต่างกัน โปรดทราบว่าเนื่องจากกระแสไฟที่ค้างอยู่ต่ำของไทริสเตอร์ TO125 ความต้านทานเริ่มต้นร 7 ต้องการพลังงานน้อยกว่าในวงจรในรูป 15. เนื่องจากผู้เขียนกลัวว่าจะสร้างความเสียหายให้กับออปโตไทริสเตอร์ LED ด้วยกระแสพัลส์ขนาดใหญ่ ความต้านทาน R6 จึงถูกรวมไว้ในวงจร เมื่อปรากฎว่าวงจรทำงานได้โดยไม่มีความต้านทานนี้และหากไม่มีวงจรก็จะทำงานได้ดีขึ้นที่แรงดันเอาต์พุตต่ำ
อุปกรณ์ไฟฟ้าแรงสูงพร้อมตัวควบคุมไทริสเตอร์
เมื่อพัฒนาแหล่งจ่ายไฟแรงสูงด้วยตัวควบคุมไทริสเตอร์ วงจรควบคุมออปโตไทริสเตอร์ที่พัฒนาโดย V.P. Burenkov (PRZ) สำหรับเครื่องเชื่อมได้รับการพัฒนาและผลิตขึ้นสำหรับวงจรนี้ ผู้เขียนแสดงความขอบคุณต่อ V.P. Burenkov สำหรับตัวอย่างกระดานดังกล่าว แผนภาพของหนึ่งในต้นแบบของวงจรเรียงกระแสแบบปรับได้โดยใช้บอร์ดที่ออกแบบโดย Burenkov จะแสดงในรูปที่ 1 17.

ข้าว. 17.
ชิ้นส่วนที่ติดตั้งบนแผงวงจรพิมพ์จะมีเส้นประล้อมรอบอยู่ในแผนภาพ ดังที่เห็นได้จากรูป 16 มีการติดตั้งตัวต้านทานการทำให้หมาด ๆ บนบอร์ดร 1 และ ร 2 สะพานเรียงกระแส VD 1 และซีเนอร์ไดโอด VD 2 และ VD 3. ชิ้นส่วนเหล่านี้ได้รับการออกแบบสำหรับแหล่งจ่ายไฟ 220Vวี - ในการทดสอบวงจรควบคุมไทริสเตอร์โดยไม่มีการเปลี่ยนแปลงในแผงวงจรพิมพ์มีการใช้หม้อแปลงไฟฟ้า TBS3-0.25U3 ซึ่งขดลวดทุติยภูมิซึ่งเชื่อมต่อในลักษณะที่แรงดันไฟฟ้ากระแสสลับ 200 จะถูกลบออกวี กล่าวคือใกล้กับแรงดันไฟฟ้าปกติของบอร์ด วงจรควบคุมทำงานคล้ายกับที่อธิบายไว้ข้างต้นนั่นคือ ตัวเก็บประจุ C1 ถูกชาร์จผ่านความต้านทานที่กันจอนร 5 และค่าความต้านทานแปรผัน (ติดตั้งภายนอกบอร์ด) จนแรงดันตกคร่อมเกินแรงดันที่ฐานทรานซิสเตอร์เวอร์มอนต์ 2 หลังจากนั้นทรานซิสเตอร์เวอร์มอนต์ 1 และ VT2 เปิดอยู่และตัวเก็บประจุ C1 จะถูกคายประจุผ่านทรานซิสเตอร์ที่เปิดอยู่และ LED ของไทริสเตอร์ออปโตคัปเปลอร์
ข้อดีของวงจรนี้คือสามารถปรับแรงดันไฟฟ้าที่ทรานซิสเตอร์เปิดได้ (โดยใช้ร 4) เช่นเดียวกับความต้านทานขั้นต่ำในวงจรไทม์มิ่ง (โดยใช้ร 5). ตามที่แสดงในทางปฏิบัติ การมีความสามารถในการปรับเปลี่ยนดังกล่าวมีประโยชน์มาก โดยเฉพาะอย่างยิ่งหากประกอบวงจรอย่างไม่ชำนาญจากชิ้นส่วนแบบสุ่ม เมื่อใช้ทริมเมอร์ R4 และ R5 คุณสามารถควบคุมแรงดันไฟฟ้าได้ภายในช่วงกว้างและการทำงานที่เสถียรของตัวควบคุม
ฉันเริ่มต้นการวิจัยและพัฒนาเพื่อพัฒนาตัวควบคุมไทริสเตอร์ด้วยวงจรนี้ ในนั้นพัลส์ทริกเกอร์ที่หายไปถูกค้นพบเมื่อไทริสเตอร์ทำงานด้วยโหลดแบบคาปาซิทีฟ (ดูรูปที่ 4) ความปรารถนาที่จะเพิ่มความเสถียรของตัวควบคุมทำให้เกิดลักษณะของวงจรในรูปที่ 1 18. ในนั้นผู้เขียนได้ทดสอบการทำงานของไทริสเตอร์ที่มีความต้านทานเริ่มต้น (ดูรูปที่ 5)

ข้าว. 18.
ในแผนภาพของรูปที่. 18. ใช้บอร์ดเดียวกันกับวงจรในรูป. 17 มีเพียงไดโอดบริดจ์เท่านั้นที่ถูกถอดออกเพราะว่า ในที่นี้มีการใช้วงจรเรียงกระแสหนึ่งตัวร่วมกับวงจรโหลดและควบคุม โปรดทราบว่าในแผนภาพในรูป ความต้านทานเริ่มต้น 17 ตัวถูกเลือกจากหลายตัวที่เชื่อมต่อแบบขนานเพื่อกำหนดค่าที่เป็นไปได้สูงสุดของความต้านทานนี้ซึ่งวงจรเริ่มทำงานอย่างเสถียร ความต้านทานของสายไฟ 10 เชื่อมต่อระหว่างแคโทดของออปโตไทริสเตอร์และตัวเก็บประจุตัวกรองว- จำเป็นต้องจำกัดกระแสไฟกระชากผ่านออปโตริสเตอร์ จนกว่าจะมีการสร้างความต้านทานนี้ขึ้น หลังจากหมุนปุ่มความต้านทานแบบแปรผัน ออพโตไทริสเตอร์จะผ่านแรงดันไฟฟ้าที่แก้ไขแล้วหนึ่งคลื่นครึ่งคลื่นทั้งหมดไปยังโหลด
จากการทดลองได้มีการพัฒนาวงจรเรียงกระแสพร้อมตัวควบคุมไทริสเตอร์ซึ่งเหมาะสำหรับการใช้งานจริง มันแสดงไว้ในรูปที่. 19.

ข้าว. 19.

ข้าว. 20.
พีซีบี SCR 1 M 0 (รูปที่ 20) ได้รับการออกแบบมาเพื่อการติดตั้งตัวเก็บประจุไฟฟ้าขนาดเล็กที่ทันสมัยและตัวต้านทานแบบลวดในตัวเรือนเซรามิกประเภทเอสคิวพี - ผู้เขียนแสดงความขอบคุณต่อ R. Peplov สำหรับความช่วยเหลือในการผลิตและการทดสอบแผงวงจรพิมพ์นี้
เนื่องจากผู้เขียนได้พัฒนาวงจรเรียงกระแสที่มีแรงดันเอาต์พุตสูงสุดที่ 500วี จำเป็นต้องมีการสำรองแรงดันเอาต์พุตไว้บางส่วนในกรณีที่แรงดันไฟฟ้าเครือข่ายลดลง ปรากฎว่าเป็นไปได้ที่จะเพิ่มแรงดันเอาต์พุตโดยเชื่อมต่อขดลวดของหม้อแปลงไฟฟ้าอีกครั้งดังแสดงในรูปที่ 1 21.

ข้าว. 21.
ฉันยังทราบด้วยว่าแผนภาพในรูป 19 และกระดานมะเดื่อ 20 ได้รับการออกแบบโดยคำนึงถึงความเป็นไปได้ในการพัฒนาต่อไป เมื่อต้องการทำสิ่งนี้บนกระดานเอสซีอาร์ 1 ม 0 มีสายเพิ่มเติมจากสายทั่วไป GND 1 และ GND 2 จากวงจรเรียงกระแสดีซี 1
การพัฒนาและติดตั้งวงจรเรียงกระแสพร้อมตัวควบคุมไทริสเตอร์เอสซีอาร์ 1 ม 0 ดำเนินการร่วมกับนักศึกษา R. Pelov ที่ ม.อ.ค ด้วยความช่วยเหลือของเขาจึงถ่ายรูปโมดูลนี้เอสซีอาร์ 1 ม 0 และออสซิลโลแกรม

ข้าว. 22. มุมมองของโมดูล SCR 1 M 0 จากด้านชิ้นส่วน

ข้าว. 23. มุมมองโมดูลเอสซีอาร์ 1 ม 0 ด้านบัดกรี

ข้าว. 24. มุมมองโมดูล SCR 1 M 0 ด้านข้าง
ตารางที่ 1. ออสซิลโลแกรมที่แรงดันไฟฟ้าต่ำ
|
เลขที่ |
ตำแหน่งตัวควบคุมแรงดันไฟฟ้าขั้นต่ำ |
ตามแบบแผน |
หมายเหตุ |
|
ที่แคโทด VD5 |
5 โวลต์/หน่วย 2 ms/div |
||
|
|
บนตัวเก็บประจุ C1 |
2 โวลต์/หน่วย 2 ms/div |
|
|
|
เช่นการเชื่อมต่อ R2 และ R3 |
2 โวลต์/หน่วย 2 ms/div |
|
|
|
ที่ขั้วบวกของไทริสเตอร์ |
100 โวลต์/หน่วย 2 ms/div |
|
|
|
ที่ไทริสเตอร์แคโทด |
50 โวลต์/หน่วย 2 มิลลิวินาที/เด |




ตารางที่ 2. ออสซิลโลแกรมที่แรงดันไฟฟ้าเฉลี่ย
|
เลขที่ |
ตำแหน่งตรงกลางของตัวควบคุมแรงดันไฟฟ้า |
ตามแบบแผน |
หมายเหตุ |
|
|
ที่แคโทด VD5 |
5 โวลต์/หน่วย 2 ms/div |
|
|
|
บนตัวเก็บประจุ C1 |
2 โวลต์/หน่วย 2 ms/div |
|
|
|
เช่นการเชื่อมต่อ R2 และ R3 |
2 โวลต์/หน่วย 2 ms/div |
|
|
|
ที่ขั้วบวกของไทริสเตอร์ |
100 โวลต์/หน่วย 2 ms/div |
|
|
|
ที่ไทริสเตอร์แคโทด |
100 โวลต์/หน่วย 2 ms/div |





ตารางที่ 3. ออสซิลโลแกรมที่แรงดันไฟฟ้าสูงสุด
|
เลขที่ |
ตำแหน่งตัวควบคุมแรงดันไฟฟ้าสูงสุด |
ตามแบบแผน |
หมายเหตุ |
|
|
ที่แคโทด VD5 |
5 โวลต์/หน่วย 2 ms/div |
|
|
|
บนตัวเก็บประจุ C1 |
1 โวลต์/หน่วย 2 ms/div |
|
|
|
เช่นการเชื่อมต่อ R2 และ R3 |
2 โวลต์/หน่วย 2 ms/div |
|
|
|
ที่ขั้วบวกของไทริสเตอร์ |
100 โวลต์/หน่วย 2 ms/div |
|
|
|
ที่ไทริสเตอร์แคโทด |
100 โวลต์/หน่วย 2 ms/div |





เพื่อกำจัดข้อเสียเปรียบนี้ วงจรควบคุมจึงถูกเปลี่ยน มีการติดตั้งไทริสเตอร์สองตัว - แต่ละตัวมีครึ่งรอบของตัวเอง ด้วยการเปลี่ยนแปลงเหล่านี้ วงจรจึงได้รับการทดสอบเป็นเวลาหลายชั่วโมงและไม่พบ "การปล่อยมลพิษ"

ข้าว. 25. วงจร SCR 1 M 0 พร้อมการดัดแปลง
การใช้ไทริสเตอร์อย่างแพร่หลายในการควบคุมแรงดันไฟฟ้าอธิบายได้จากข้อดีดังต่อไปนี้เมื่อเปรียบเทียบกับวงจรที่กล่าวถึงก่อนหน้านี้:
ประสิทธิภาพที่สูงขึ้นเนื่องจากแรงดันไฟฟ้าตกต่ำในสถานะการนำไฟฟ้า (ประมาณ 2 V)
การควบคุมความเร็วสูงซึ่งช่วยให้แรงดันไฟฟ้าที่แก้ไขมีความเสถียรและการป้องกันวงจรเรียงกระแสจากการโอเวอร์โหลดและการลัดวงจร
ต้องการพลังการควบคุมน้อยลง
ขนาดและน้ำหนักโดยรวมเล็กลง
วาล์วควบคุม -
ไทริสเตอร์ - สามารถอยู่ในสองสถานะสุดขั้ว (รูปที่ 122, a): เปิด (มาตรา ดวงอาทิตย์)และ …
ปิด (ส่วน 0A) ช่วงเวลาของการเปิดไทริสเตอร์สามารถปรับได้โดยใช้พัลส์ควบคุมกระแสไปที่ ร-พี- การเปลี่ยนแปลงที่อยู่ติดกับแคโทด (รูปที่ 122, ข)กระแสโหลดที่ไหลผ่านไทริสเตอร์แบบเปิดจะทำให้เกิดอคติทั้งสาม
ข้าว. 122. ลักษณะแรงดันกระแสของไทริสเตอร์ (ก)โครงสร้างของมัน (ข)และการกำหนดกราฟิกเชิงสัญลักษณ์ (c): ฉัน -ควบคุมกระแส; เอ -ขั้วบวก; ถึง -แคโทด: UE - อิเล็กโทรดควบคุม/

ข้าว. 123. บล็อกไดอะแกรมของวงจรเรียงกระแสควบคุม (i) ไดอะแกรมของ RVB ที่ง่ายที่สุด (b) และไดอะแกรมแรงดันไฟฟ้าที่อินพุตและเอาต์พุต (c)
เขา ร-พี- การเปลี่ยนแปลงในทิศทางไปข้างหน้าและอิเล็กโทรดควบคุม (CE) สูญเสียอิทธิพลต่อกระบวนการที่เกิดขึ้นในไทริสเตอร์ เมื่อกระแสไปข้างหน้าลดลงเหลือศูนย์หลังจากที่ประจุของพาหะส่วนน้อยในบริเวณฐานถูกดูดซับ ไทริสเตอร์จะถูกปิด และคุณสมบัติการควบคุมจะถูกกู้คืน การกำหนดกราฟิกแบบเดิมของไทริสเตอร์จะแสดงในรูปที่ 1 122, วี.
ในรูป 123a แสดงแผนภาพบล็อกของวงจรเรียงกระแสแบบควบคุมโดยใช้วาล์วควบคุม
ความแตกต่างพื้นฐานระหว่างวงจรเรียงกระแสแบบควบคุม (RC) และวงจรที่ไม่มีการควบคุมคือการมีบล็อกวาล์วแบบปรับได้ (VB) และอุปกรณ์ควบคุม (CD) ที่ควบคุมแรงดันไฟฟ้าของเครือข่าย วงจร RVB ที่ง่ายที่สุดบนไทริสเตอร์ตัวเดียว VSแสดงในรูป 123, ข.ควรจำไว้ว่าในการเปิดไทริสเตอร์จะต้องปฏิบัติตามเงื่อนไขต่อไปนี้: แรงดันไฟฟ้าที่ขั้วบวกจะต้องเป็นบวก แต่น้อยกว่า ยูประชาสัมพันธ์ และต้องใช้แรงดันไฟฟ้าบวกที่สอดคล้องกับกระแสการปลดล็อคกับอิเล็กโทรดควบคุม (CE) เงื่อนไขแรกเป็นที่พอใจสำหรับครึ่งคลื่นแรงดันบวก ยู 2 , และเพื่อให้เป็นไปตามเงื่อนไขที่สอง พัลส์แรงดันไฟฟ้าบวกสำหรับการปลดล็อค (ควบคุม) จะถูกส่งไปยังอิเล็กโทรดควบคุมของไทริสเตอร์ เอ่อ.
ในขณะที่พัลส์ควบคุมมาถึงซึ่งสอดคล้องกับมุมการยิง a ไทริสเตอร์จะสูญเสียคุณสมบัติการควบคุมดังนั้นเมื่อแรงดันไฟฟ้าที่ขั้วบวกกลายเป็นศูนย์ก็จะปิดลง รูปคลื่นแรงดันไฟฟ้าคร่อมโหลดตัวต้านทาน ร H ที่ไม่มีตัวกรองแสดงไว้ในรูปที่. 123, วี.ช่วงเวลาการเปลี่ยนไทริสเตอร์
สามารถปรับค่าได้ภายในครึ่งคลื่นบวกของแรงดันเอาต์พุต ยู 2หม้อแปลงไฟฟ้าเช่น ในช่วง 0 ≤α≤π ยิ่งไปกว่านั้น หากไทริสเตอร์เปิดอยู่ที่ α = 0 แสดงว่าแรงดันไฟฟ้าโหลดที่แก้ไขโดยเฉลี่ย ยูเอ็น.เอส.วี. =0. วิธีการควบคุมไทริสเตอร์นี้เรียกว่าเฟสพัลส์
ในวงจรเรียงกระแสควบคุมที่พิจารณาระลอกแรงดันโหลดมีขนาดค่อนข้างใหญ่ดังนั้นเพื่อลดความจำเป็นต้องเปิดตัวกรองที่ปรับให้เรียบ ควรสังเกตว่าในวงจรเรียงกระแสที่ควบคุมด้วยไทริสเตอร์นั้นจะใช้ตัวกรองที่เริ่มต้นจากตัวเหนี่ยวนำเนื่องจากเมื่อเชื่อมต่อตัวกรองแบบคาปาซิทีฟทันทีประจุของตัวเก็บประจุผ่านไทริสเตอร์ที่เปิดอยู่สามารถมาพร้อมกับกระแสไฟฟ้าขนาดใหญ่ซึ่งอาจทำให้ไทริสเตอร์เสียหายได้ .
พิจารณาการทำงานของวงจรเรียงกระแสควบคุมสองเฟส (รูปที่ 124, ก)พร้อมตัวกรองอินดัคทีฟ-คาปาซิทีฟ ในวงจรนี้สามารถเลือกโหมดการทำงานได้สองโหมด: ไม่มีการปิดกั้นไดโอด (วีดี)และมีบล็อคไดโอด ความแตกต่างระหว่างโหมดเหล่านี้อยู่ที่วิธีการปิดไทริสเตอร์

ข้าว. 124. แผนผังของวงจรเรียงกระแสควบคุมสองเฟส (ก) แผนภาพเวลาของแรงดันไฟฟ้าที่อินพุตและเอาต์พุต (ข)และการปรับเส้นโค้ง (ใน 1 -ไม่มีไดโอด วี.ดี.; 2 - ด้วยไดโอด วี.ดี.
วงจรเรียงกระแสทำงานโดยไม่มีไดโอดบล็อกดังต่อไปนี้ ด้วยการมาถึงของพัลส์ควบคุมไทริสเตอร์ VS1เปิดด้วยมุมปล่อย α แรงดันไฟฟ้าของเฟสแรกของขดลวดทุติยภูมิจะถูกส่งไปยังเอาต์พุตของวงจรเรียงกระแส ยู' 2 . ที่ที ≥ nแรงดันไฟฟ้า คุณ'2เปลี่ยนขั้วเป็นลบ แต่ไทริสเตอร์ VS1ไม่ปิดเนื่องจากกระแสโช้คตัวกรองไหลผ่าน ล f และแรงดันไฟฟ้าเหนี่ยวนำตัวเองช่วยให้มั่นใจในสถานะเปิด
ที่ เสื้อ =α + นไทริสเตอร์เปิดขึ้น VS2,ซึ่งส่งแรงดันไฟฟ้าไปยังเอาต์พุต ยู"2ระยะที่สองของขดลวดทุติยภูมิ ในกรณีนี้ กระแสโช้คของตัวกรอง ล f สลับไปที่เฟสที่สองและไทริสเตอร์ VS1ปิด แรงดันเอาต์พุตของวงจรเรียงกระแส คุณโอและโหลด ยู H แสดงไว้ในรูปที่. 124, ข(พื้นที่แรเงา)
ด้วยมูลค่าที่มากพอสมควร ล f = R H /ωมุมสวิตชิ่งของไทริสเตอร์สามารถปรับได้ตั้งแต่ 0 ถึง π/2 ดังแสดงในรูป 124, วี(โค้งที่ 1 ณ ล=∞).
แรงดันไฟฟ้าโหลดจะเพิ่มขึ้นเมื่อมุม α ลดลง และลดลงเมื่อเพิ่มขึ้น
เมื่อใช้งานวงจรเรียงกระแสด้วยไดโอดบล็อค วี.ดี.ไทริสเตอร์ VS 1i VS 2 จะปิดเมื่อแรงดันไฟฟ้าที่ขั้วบวกกลายเป็นศูนย์ ในกรณีนี้การไหลของกระแสในโช้คตัวกรองจะไม่ถูกรบกวนเนื่องจากการรวมไดโอด วี.ดี.
เป็นผลให้ส่วนหนึ่งของช่วงเวลาจากπถึงπ+αกระแสในตัวเหนี่ยวนำ (และดังนั้นจึงอยู่ในโหลด) ผ่านไดโอด วีดีและแรงดันไฟฟ้าที่เอาต์พุตของวงจรเรียงกระแสจะไม่เปลี่ยนขั้ว ดังแสดงในรูป 124, ข.
มุม α ของไทริสเตอร์ที่ยิงในวงจรด้วยไดโอด วี.ดี.สามารถปรับได้จากศูนย์ถึง π ดังแสดงในรูป 124, วี(โค้งที่ 2 ณ ล= 0).
ที่มุมการยิงเดียวกันของไทริสเตอร์ในวงจรที่ไม่มีไดโอดบล็อกแรงดันไฟฟ้าข้ามโหลดจะน้อยกว่าในวงจรที่มีไดโอดบล็อกเนื่องจากในช่วงส่วนหนึ่งของระยะเวลาการทำซ้ำของแรงดันไฟฟ้าอินพุตแรงดันลบจะถูกส่งไปยัง เอาท์พุท
วงจรเรียงกระแสควบคุมแบบบริดจ์วงจรเรียงกระแสบริดจ์สามารถสร้างขึ้นด้วยไทริสเตอร์จำนวนน้อยกว่า (มากกว่าสี่) เนื่องจากเพื่อให้แน่ใจว่าการควบคุมก็เพียงพอที่จะรวมไว้ในแต่ละวงจรซีรีย์สองชุดซึ่งประกอบด้วยไดโอดสองตัว, ไดโอดควบคุมหนึ่งตัวและอีกอันที่ไม่สามารถควบคุมได้ (รูปที่ 125, ก)การใช้ไดโอดที่ควบคุมได้สองตัวแทนที่จะเป็นสี่ตัว (ดูรูปที่ 124) ช่วยให้วงจรควบคุมง่ายขึ้นและลดต้นทุนของกลุ่มวาล์ว
ลองพิจารณาการทำงานของวงจรเรียงกระแสบริดจ์ที่ไทริสเตอร์ทำงานพร้อมกัน VS1และวาล์ว วีดี2หรือไทริสเตอร์ VS2และวาล์ว วี.ดี. 1. แผนภาพเวลาของแรงดันและกระแส

ข้าว. 125. วงจรบริดจ์เรกติไฟเออร์ควบคุม (ก)และแผนภาพเวลาของแรงดันและกระแสในวงจรนี้ (ข)
kov เมื่อใช้งานวงจรดังกล่าวบนโหลดอุปนัยจะแสดงในรูปที่ 1 125, 6.
ในช่วงเวลาหนึ่ง ที 1 ต่ออิเล็กโทรดควบคุมไทริสเตอร์ VS 1 มีการจ่ายพัลส์ควบคุมเพื่อเปิด ในช่วงเวลาตั้งแต่ ที 1 ถึง ทีกระแสไฟฟ้า 2 กระแสไหลผ่านไทริสเตอร์ VS 1 และวาล์ว วี.ดี.และแรงดันไฟฟ้าที่เอาต์พุตของวงจรเรียงกระแสจะทำซ้ำแรงดันไฟฟ้าขาเข้า ยู 2. ในช่วงเวลาหนึ่ง ที 3 แรงดันไฟฟ้า ยู 2เปลี่ยนขั้วและวาล์ว วี.ดี. 2 ถูกล็อคและวาล์ว วี.ดี. 1 เปิด การสลับไทริสเตอร์ในเวลานี้ไม่สามารถเกิดขึ้นได้ เนื่องจากอิเล็กโทรดควบคุมของไทริสเตอร์ VS2ไม่ได้รับแรงกระตุ้นการควบคุม ส่งผลให้ในช่วงระยะเวลาหนึ่งตั้งแต่ ที 2to ที 3 ไทริสเตอร์เปิด VS 1 และวาล์ว วีดี2และกระแสโหลด I 0 ไหลผ่านพวกมัน
แรงดันไฟฟ้าที่แก้ไขแล้ว คุณ 0ในช่วงเวลานี้เป็นศูนย์ (เนื่องจากเอาต์พุตของวงจรเรียงกระแสลัดวงจร) และกระแสโหลดจะถูกรักษาโดยพลังงานที่เก็บไว้ในตัวเหนี่ยวนำ ล.ในช่วงเวลาหนึ่ง ที 3เนื่องจากพัลส์ควบคุม ไทริสเตอร์จะเปิดขึ้น VS2,และไทริสเตอร์ VS 1 ถูกล็อค เนื่องจากมีการใช้แรงดันย้อนกลับ
ในช่วงเวลาตั้งแต่ ที 3to ทีไทริสเตอร์ยังนำกระแสอีกด้วย VS 2, และวาล์ว วี.ดี. 1, และแรงดันไฟฟ้าที่เอาต์พุตของวงจรเรียงกระแส ยู 0 เช่นเดียวกับแรงดันไฟฟ้าขาเข้า ยู 2, แต่ด้วยเครื่องหมายตรงกันข้าม
ณ เวลา U การสลับกระแสจะเกิดขึ้นอีกครั้งในกลุ่มวาล์วที่ไม่มีการควบคุม: วาล์ว VD1 ถูกปิด และวาล์ว VD2 ถูกเปิด
ในช่วงเวลาตั้งแต่ t4 ถึง t5 ไทริสเตอร์ VS2 และวาล์ว VD1 จะเปิดอยู่ แรงดันไฟฟ้าที่เอาต์พุตของวงจรเรียงกระแส U0 = 0 และกระแสโหลดIоจะคงที่เนื่องจากพลังงานที่เก็บอยู่ในตัวเหนี่ยวนำ ในช่วงเวลาตั้งแต่ t5 ถึง t6 กระบวนการจะเหมือนกันกับกระบวนการในช่วงเวลาตั้งแต่ t1 ถึง t2
ดังที่เห็นได้จากรูป 125, b, แผนภาพเวลาของแรงดันไฟฟ้าที่แก้ไข U0 ในวงจรนี้เหมือนกับในวงจรเรียงกระแสที่มีโหลดแอ็คทีฟ
อุปกรณ์ป้องกันโอเวอร์โหลด
แหล่งจ่ายไฟสำรองมักติดตั้งอุปกรณ์ป้องกันอิเล็กทรอนิกส์ (EPD) จากการโอเวอร์โหลดไฟฟ้าลัดวงจร อุปกรณ์ดังกล่าวประกอบด้วยองค์ประกอบต่อไปนี้: เซ็นเซอร์ของปริมาณที่ควบคุม (กระแส, แรงดันหรืออุณหภูมิ); อุปกรณ์เกณฑ์ (TD) หรือวงจรเปรียบเทียบ อุปกรณ์ผู้บริหาร (ED) บ่อยครั้งที่อุปกรณ์จ่ายไฟจำเป็นต้องได้รับการปกป้องจากการโอเวอร์โหลด ในกรณีนี้ เมื่อค่าปัจจุบันเกินค่าที่อนุญาต อุปกรณ์เกณฑ์จะเปิดขึ้นและนำแอคชูเอเตอร์เข้าสู่สถานะโหลดออฟ
อุปกรณ์ป้องกันถูกใช้งานโดยมีการเพิ่มพลังงานใหม่โดยอัตโนมัติหลังจากเวลาที่กำหนดหรือโดยจำกัดกำลังไฟฟ้าที่จ่ายให้กับโหลด
 |
แผนภาพวงจรของอุปกรณ์ป้องกันกระแสเกิน (และการใช้พลังงาน) แสดงในรูปที่ 1 126. อุปกรณ์ทำงานดังนี้ แรงดันไฟฟ้าจากขดลวดทุติยภูมิของหม้อแปลงกระแส ต้า,ใช้เป็นตัวแปลงกระแส แก้ไขด้วยไดโอด วีดี1และเรียบด้วยตัวกรอง ร 7, ค1.ตัวต้านทานแบบแปรผัน R1ใช้เพื่อปรับเกณฑ์การตอบสนอง องค์ประกอบลอจิคัลถูกใช้เป็นอุปกรณ์เกณฑ์ DD1.1,สร้างขึ้นโดยใช้เทคโนโลยี CMOS ระดับการตอบสนองขององค์ประกอบดังกล่าวมีเสถียรภาพและใกล้กับแรงดันไฟฟ้าของวงจรไมโครเพียงครึ่งหนึ่ง ที่กระแสโหลดเพิ่มขึ้นหลังจากการเปิดใช้งานองค์ประกอบ ดีดีแอล]มัลติไวเบรเตอร์สแตนด์บายที่ใช้ลอจิกเกตจะถูกทริกเกอร์ DD1.2และ DD1.3(เครื่องสั่นเดี่ยว) ซึ่งสร้างแรงดันเอาต์พุตเชิงลบที่จะปิด (หรือล็อค) วงจรกำลังโหลด หลังจากนั้นครู่หนึ่ง พิจารณาจากเวลาคายประจุของตัวเก็บประจุ ค2ผ่านตัวต้านทาน R3,ช็อตเดียวจะสลับไปที่สถานะเริ่มต้น (สแตนด์บาย) โดยมีการก่อตัวของแรงดันไฟฟ้าบวกที่เอาต์พุต แรงดันไฟฟ้านี้สอดคล้องกับสัญญาณที่โหลดเปิดอยู่หรือแหล่งจ่ายไฟกลับคืนสู่สภาวะการทำงานปกติ
ข้าว. 126. วงจรไฟฟ้าของอุปกรณ์ป้องกันกระแสเกินพร้อมการฟื้นฟูสถานะการทำงานของแหล่งพลังงานโดยอัตโนมัติ
อุปกรณ์ป้องกันแรงดันไฟเกินและอุณหภูมิทำงานในลักษณะเดียวกันคือ เมื่อมีอุณหภูมิหรือแรงดันไฟฟ้ากระโดด สัญญาณที่เกี่ยวข้องจะถูกส่งไปยังองค์ประกอบลอจิก DD1.1,ซึ่งจะเรียกใช้สวิตช์แบบช็อตเดียวที่จะปิดเครื่องในช่วงเวลาหนึ่ง
โดยสรุปควรสังเกตว่าการเลือกวงจรและพารามิเตอร์ของแหล่งจ่ายไฟรอง
องค์ประกอบถูกกำหนดโดยระดับข้อกำหนดสำหรับปัจจัยการรักษาเสถียรภาพแรงดันไฟฟ้าและพลังงานที่ต้องใช้ในการจ่ายไฟให้กับอุปกรณ์อิเล็กทรอนิกส์ สำหรับอุปกรณ์ที่ทรงพลังมาก (1...100 kW - เครื่องเสียงสำหรับคอนเสิร์ตฮอลล์ สถานีวิทยุ ฯลฯ) รวมถึงยานพาหนะที่มีระบบขับเคลื่อนแบบควบคุม ข้อกำหนดสำหรับความเสถียรของแรงดันไฟฟ้าจะต่ำกว่า พวกเขาใช้หน่วยเรียงกระแสอันทรงพลังสำหรับแรงดันไฟฟ้าสามเฟสโดยใช้ไทริสเตอร์
เมื่อใช้งานวงจรเรียงกระแสอาจจำเป็นต้องเปลี่ยน (ปรับ) ค่าของแรงดันไฟฟ้าที่แก้ไขได้อย่างราบรื่น ซึ่งสามารถทำได้ทั้งด้านถาวรและด้านข้าง กระแสสลับในรูป 13.10 น. ข)ดังนั้นในช่วงครึ่งรอบแรก (/ 0 - ข)แรงดันไฟฟ้าเครือข่ายบวกที่ขั้วบวกของไทริสเตอร์ตัวแรกในช่วงครึ่งรอบหลัง - ที่ขั้วบวกของไทริสเตอร์ตัวที่สอง ยูยะ 2.การปลดล็อคพัลส์แรงดันไฟฟ้า และคุณ[และ และ y2จ่ายจากระบบควบคุมโดยมีความล่าช้าเป็นมุม t สัมพันธ์กับจุดเริ่มต้นของแรงดันไฟฟ้าบวก และ 2และ และ 2

ข้าว. 13.10. วงจรเรียงกระแสครึ่งคลื่นเฟสเดียวโดยใช้ไทริสเตอร์: เอ-โครงการไฟฟ้า 6- แผนภาพแรงดันและกระแส

ในขณะนี้ /i ไทริสเตอร์เปิดขึ้น แรงดันไฟฟ้า?/ 0 บนโหลด ฉันเพิ่มขึ้นอย่างกะทันหันแล้วเปลี่ยนตามเส้นโค้งแรงดันเฟส และ 2ขณะนั้น / 2 แรงดัน และ 2ลดลงเหลือศูนย์ และไทริสเตอร์ KUI จะปิดลง ณ ขณะ / 3 ไทริสเตอร์ K เปิดขึ้น? 2 และยังคงเปิดอยู่จนถึงช่วงเวลา ґ 4 เมื่อแรงดันไฟฟ้าที่ขั้วบวกลดลงเป็นศูนย์ ในช่วงเวลา / 2 - ґ 3 ไทริสเตอร์ทั้งสองจะปิดและแรงดันไฟฟ้าตกคร่อมโหลดจะเป็นศูนย์ ดังนั้นกระบวนการจึงเกิดขึ้นซ้ำ ระบบควบคุมสามารถเปลี่ยนมุมควบคุม เวลาเริ่มต้นของไทริสเตอร์แต่ละตัว และแรงดันไฟฟ้าที่แก้ไขโดยเฉลี่ย และ 0และกระแส / 0 เมื่อทำงานบนโหลดที่ใช้งานอยู่ เส้นโค้งกระแสไฟฟ้าที่แก้ไขจะเป็นไปตามรูปร่างของเส้นโค้งแรงดันไฟฟ้าที่แก้ไขแล้ว?/o-
ในวงจรเรียงกระแสไทริสเตอร์ แรงดันไฟฟ้าที่เรียงกระแสสามารถปรับได้อย่างราบรื่นในช่วงกว้าง
วงจรเรียงกระแสบริดจ์เฟสเดียวที่ใช้ไทริสเตอร์แสดงในรูปที่ 1 13.11. ที่นี่แรงดันไฟฟ้าควบคุมจะถูกส่งไปยังไทริสเตอร์จากจุดกึ่งกลาง / ขดลวดทุติยภูมิของการแปลง
โทร่า 7U ย. แรงดันไฟฟ้าควบคุมจะจ่ายให้กับไทริสเตอร์ตัวที่สองจากห่วงโซ่การเปลี่ยนเฟส ฉัน 2 ซี(จุด 2). การเปลี่ยนมุมเปิด a t กระทำโดยตัวต้านทานแบบปรับค่าได้ ฉัน 3.ไดโอด วี)z และ IO4 ปิดวงจรควบคุมไทริสเตอร์
กระบวนการในวงจรเกิดขึ้นดังนี้ ในครึ่งวงจรบวกของแรงดันไฟฟ้าควบคุม และที่ควบคุมกระแสที่ไหลผ่านวงจร: จุด /, ตัวต้านทาน ฉัน,ไทริสเตอร์ UYA,ไดโอด У0 4,ตัวต้านทาน /? 3 จุด 3. ไทริสเตอร์จะเปิดและแก้ไขกระแสที่ไหลจากขดลวดทุติยภูมิของหม้อแปลงไฟฟ้า ที่ผ่าน K$i โหลด ฉันไดโอด คุณ ฉัน

ในช่วงครึ่งวงจรลบของแรงดันไฟฟ้าควบคุม กระแสควบคุมจะผ่านวงจร: จุด 3, ตัวต้านทาน ฉันอายุ 3 ขวบตัวต้านทาน ฉัน 2ไทริสเตอร์ K$2, ไดโอด ยูโอชั่วโมง จุด /. ไทริสเตอร์เปิดขึ้น ยู32,และกระแสที่แก้ไขจะไหลจากขดลวดทุติยภูมิของหม้อแปลงไฟฟ้ากำลัง ที่ผ่าน ยูยะ 2,โหลด ฉันและ,ไดโอด K/) 2. ขดลวดหม้อแปลง ที่และ 7U y มักจะรวมกันบนคอร์เดียว
มุมเปิด at แตกต่างกันไปตั้งแต่ 20 ถึง 160° การแพร่กระจายภายในขอบเขตการควบคุมดังกล่าวเป็นผลมาจากความจริงที่ว่าด้วยแรงดันไฟฟ้าไซน์ซอยด์ ไทริสเตอร์มีการแพร่กระจายอย่างมากในช่วงเวลาเปิด การแพร่กระจายการควบคุมสามารถลดลงได้โดยการส่งพัลส์ที่มีขอบนำที่สูงชันไปที่อิเล็กโทรดควบคุม เพื่อจุดประสงค์นี้จึงใช้เครื่องกำเนิดพัลส์ทรานซิสเตอร์
วงจรบริดจ์สามเฟสของวงจรเรียงกระแสควบคุมจะแสดงในรูปที่ 1 13.12. การปรับแรงดันไฟขาออกในวงจรสามเฟสนั้นดำเนินการในลักษณะเดียวกับในวงจรเฟสเดียว ไทริสเตอร์ถูกเปิดโดยพัลส์ควบคุมและล็อคเมื่อมีการใช้แรงดันไฟฟ้าลบกับขั้วบวก
เพื่อควบคุมแรงดันไฟขาออกในวงจรไฟฟ้ากระแสสลับด้วยวงจรเรียงกระแส จะใช้วงจรเรียงกระแสแบบควบคุม นอกเหนือจากวิธีการอื่นๆ ในการควบคุมแรงดันไฟขาออกหลังวงจรเรียงกระแส เช่น LATR หรือลิโน่แล้ว วงจรเรียงกระแสแบบควบคุมยังช่วยให้คุณได้รับประสิทธิภาพที่มากขึ้นด้วยความน่าเชื่อถือสูงของวงจร ซึ่งไม่สามารถพูดได้เกี่ยวกับการควบคุมอย่างใดอย่างหนึ่งโดยใช้ LATR หรือการควบคุมลิโน่
การใช้วาล์วควบคุมมีความก้าวหน้ามากขึ้นและยุ่งยากน้อยกว่ามาก ไทริสเตอร์เหมาะที่สุดสำหรับบทบาทของวาล์วควบคุม
ในสถานะเริ่มต้น ไทริสเตอร์จะถูกล็อค และมีสถานะเสถียรที่เป็นไปได้สองสถานะ: ปิดและเปิด (กำลังดำเนินการ) หากแรงดันไฟฟ้าแหล่งกำเนิดสูงกว่าจุดทำงานด้านล่างของไทริสเตอร์ ดังนั้นเมื่อมีการจ่ายพัลส์ปัจจุบันให้กับอิเล็กโทรดควบคุม ไทริสเตอร์จะเข้าสู่สถานะการนำไฟฟ้า และพัลส์ถัดไปที่จ่ายให้กับอิเล็กโทรดควบคุมจะไม่ส่งผลกระทบต่อแอโนด กระแสไฟในทางใดทางหนึ่งนั่นคือวงจรควบคุมมีหน้าที่รับผิดชอบในการเปิดไทริสเตอร์เท่านั้น แต่ไม่ใช่สำหรับการล็อคมัน อาจเป็นที่ถกเถียงกันอยู่ว่าไทริสเตอร์ได้รับพลังงานอย่างมีนัยสำคัญ
ในการปิดไทริสเตอร์จำเป็นต้องลดกระแสแอโนดลงเพื่อให้น้อยกว่ากระแสพักซึ่งทำได้โดยการลดแรงดันไฟฟ้าลงหรือเพิ่มความต้านทานโหลด
ไทริสเตอร์ในสถานะเปิดสามารถนำกระแสได้สูงถึงหลายร้อยแอมแปร์ แต่ในขณะเดียวกันไทริสเตอร์ก็ค่อนข้างเฉื่อย เวลาเปิดไทริสเตอร์คือจาก 100 ns ถึง 10 μs และเวลาปิดจะนานกว่าสิบเท่า - จาก 1 μsถึง 100 μs
เพื่อให้ไทริสเตอร์ทำงานได้อย่างน่าเชื่อถือ อัตราการเพิ่มขึ้นของแรงดันแอโนดไม่ควรเกิน 10 - 500 V/μs ขึ้นอยู่กับรุ่นของส่วนประกอบ ไม่เช่นนั้นการสลับที่ผิดพลาดอาจเกิดขึ้นเนื่องจากการกระทำของกระแสคาปาซิทีฟผ่านทางรอยต่อ p-n
เพื่อหลีกเลี่ยงการสลับที่ผิดพลาด อิเล็กโทรดควบคุมไทริสเตอร์จะถูกแบ่งด้วยตัวต้านทานเสมอ ซึ่งความต้านทานมักจะอยู่ในช่วง 51 ถึง 1,500 โอห์ม

นอกจากไทริสเตอร์แล้ว ยังมีการใช้ไทริสเตอร์อื่นๆ เพื่อควบคุมแรงดันไฟฟ้าเอาท์พุตในวงจรเรียงกระแส: ไทรแอก ไดนิสเตอร์ และไทริสเตอร์แบบล็อคได้ ไดนิสเตอร์จะเปิดทำงานโดยแรงดันไฟฟ้าที่ใช้กับแอโนด และมีอิเล็กโทรดสองตัวเหมือนกับไดโอด
Triacs มีความโดดเด่นด้วยความสามารถในการเปิดพัลส์ควบคุมทั้งที่สัมพันธ์กับขั้วบวกหรือสัมพันธ์กับแคโทดอย่างไรก็ตามอุปกรณ์เหล่านี้ทั้งหมดเช่นไทริสเตอร์จะถูกปิดโดยการลดกระแสแอโนดให้เป็นค่าที่ต่ำกว่ากระแสที่ค้างไว้ สำหรับไทริสเตอร์ที่ปิดอยู่นั้นสามารถปิดได้โดยการใช้กระแสไฟฟ้าที่มีขั้วย้อนกลับกับอิเล็กโทรดควบคุม แต่ค่าเกนเมื่อปิดจะต่ำกว่าเมื่อเปิดถึงสิบเท่า
ไทริสเตอร์, ไทรแอก, ไดนิสเตอร์, ไทริสเตอร์ควบคุม - อุปกรณ์ทั้งหมดเหล่านี้ใช้ในแหล่งจ่ายไฟและในวงจรอัตโนมัติเพื่อควบคุมและรักษาเสถียรภาพของแรงดันไฟฟ้าและพลังงานตลอดจนเพื่อวัตถุประสงค์ในการป้องกัน

ตามกฎแล้วไทริสเตอร์จะใช้แทนไดโอดในวงจรเรียงกระแสที่มีการควบคุม ในสะพานเฟสเดียว จุดสวิตช์ของไดโอดและจุดสวิตช์ของไทริสเตอร์จะแตกต่างกัน มีความแตกต่างระหว่างเฟส ซึ่งสามารถสะท้อนให้เห็นได้โดยการพิจารณามุม
ส่วนประกอบ DC ของแรงดันไฟฟ้าโหลดมีความสัมพันธ์แบบไม่เชิงเส้นกับมุมนี้ เนื่องจากแรงดันไฟฟ้าของแหล่งจ่ายไฟเริ่มแรกจะเป็นแบบไซน์ซอยด์ สามารถหาส่วนประกอบแรงดันไฟฟ้าคงที่ที่โหลดที่เชื่อมต่อหลังจากวงจรเรียงกระแสแบบปรับได้โดยใช้สูตร:

ลักษณะการควบคุมของวงจรเรียงกระแสที่ควบคุมด้วยไทริสเตอร์แสดงให้เห็นถึงการพึ่งพาแรงดันเอาต์พุตกับโหลดบนเฟส (มุม) ของการเปิดสวิตช์สะพาน:

สำหรับโหลดแบบเหนี่ยวนำ กระแสที่ไหลผ่านไทริสเตอร์จะมีรูปทรงสี่เหลี่ยมผืนผ้า และที่มุมที่มากกว่าศูนย์ กระแสจะถูกดึงเข้ามาเนื่องจากการกระทำของแรงเคลื่อนไฟฟ้าแบบเหนี่ยวนำในตัวจากการเหนี่ยวนำของโหลด

ในกรณีนี้ฮาร์มอนิกหลักของกระแสไฟหลักจะเลื่อนไปสัมพันธ์กับแรงดันไฟฟ้าในมุมหนึ่ง เพื่อกำจัดการขันให้แน่น จะใช้ไดโอดเป็นศูนย์ซึ่งสามารถปิดกระแสไฟฟ้าและให้การเปลี่ยนแปลงน้อยกว่าครึ่งหนึ่งของมุมการสลับของสะพาน