 ทางเข้า
ทางเข้าโครงร่างของแหล่งจ่ายไฟแบบสวิตชิ่งอันทรงพลังตาม tl494 การสลับแหล่งจ่ายไฟในห้องปฏิบัติการโดยใช้ TL494
วิธีสร้างแหล่งจ่ายไฟเต็มรูปแบบด้วยตัวเองด้วยช่วงแรงดันไฟฟ้าที่ปรับได้ 2.5-24 โวลต์นั้นง่ายมาก ใคร ๆ ก็สามารถทำซ้ำได้โดยไม่ต้องมีประสบการณ์วิทยุสมัครเล่น
เราจะสร้างมันจากแหล่งจ่ายไฟคอมพิวเตอร์เครื่องเก่า TX หรือ ATX ไม่สำคัญหรอก โชคดีตลอดหลายปีของยุคพีซี บ้านทุกหลังมีฮาร์ดแวร์คอมพิวเตอร์เก่าสะสมไว้เพียงพอแล้ว และหน่วยจ่ายไฟก็น่าจะเป็น นอกจากนี้ยังมีดังนั้นราคาของผลิตภัณฑ์โฮมเมดจะไม่มีนัยสำคัญและสำหรับผู้เชี่ยวชาญบางคนจะเป็นศูนย์รูเบิล .
ฉันได้รับบล็อก AT นี้เพื่อทำการดัดแปลง

ยิ่งคุณใช้แหล่งจ่ายไฟที่ทรงพลังมากเท่าไรผลลัพธ์ก็จะยิ่งดีขึ้นเท่านั้น ผู้บริจาคของฉันคือเพียง 250W พร้อม 10 แอมแปร์บนบัส +12v แต่ในความเป็นจริงด้วยโหลดเพียง 4 A มันไม่สามารถรับมือได้อีกต่อไปแรงดันเอาต์พุตจะลดลง อย่างสมบูรณ์.
ดูสิ่งที่เขียนไว้ในกรณี

ดังนั้นลองดูด้วยตัวคุณเองว่าคุณวางแผนที่จะรับกระแสไฟฟ้าประเภทใดจากแหล่งจ่ายไฟที่มีการควบคุมศักยภาพของผู้บริจาคและวางลงในทันที
มีตัวเลือกมากมายสำหรับการปรับเปลี่ยนแหล่งจ่ายไฟคอมพิวเตอร์มาตรฐาน แต่ทั้งหมดนั้นขึ้นอยู่กับการเปลี่ยนแปลงการเดินสายของชิป IC - TL494CN (อะนาล็อก DBL494, KA7500, IR3M02, A494, MV3759, M1114EU, MPC494C ฯลฯ )

รูปที่ 0 Pinout ของไมโครวงจร TL494CN และอะนาล็อก
ลองดูหลายตัวเลือกการใช้วงจรจ่ายไฟของคอมพิวเตอร์บางทีหนึ่งในนั้นอาจเป็นของคุณและการจัดการสายไฟจะง่ายขึ้นมาก
โครงการที่ 1
ไปทำงานกันเถอะ
ก่อนอื่นคุณต้องถอดแยกชิ้นส่วนตัวเรือนแหล่งจ่ายไฟ คลายเกลียวสลักเกลียวสี่ตัว ถอดฝาครอบออกแล้วมองเข้าไปด้านใน

เรากำลังมองหาชิปบนบอร์ดจากรายการด้านบน หากไม่มี คุณสามารถค้นหาตัวเลือกการแก้ไขสำหรับ IC ของคุณบนอินเทอร์เน็ต
ในกรณีของฉันพบชิป KA7500 บนบอร์ดซึ่งหมายความว่าเราสามารถเริ่มศึกษาการเดินสายไฟและตำแหน่งของชิ้นส่วนที่ไม่จำเป็นซึ่งจำเป็นต้องถอดออก

เพื่อความสะดวกในการใช้งาน ขั้นแรกให้คลายเกลียวบอร์ดทั้งหมดออกจนหมดและถอดออกจากเคส

ในภาพคือปลั๊กไฟ 220v.
มาลองถอดปลั๊กไฟและพัดลม บัดกรีหรือตัดสายไฟเอาท์พุตเพื่อไม่ให้รบกวนความเข้าใจของเราเกี่ยวกับวงจร เหลือเพียงอันที่จำเป็น สีเหลืองหนึ่งอัน (+12v) สีดำ (ทั่วไป) และสีเขียว* (สตาร์ท เปิด) หากมี

หน่วย AT ของฉันไม่มีสายสีเขียว จึงสตาร์ททันทีเมื่อเสียบเข้ากับเต้ารับ หากหน่วยเป็น ATX ก็จะต้องมีสายสีเขียวจะต้องบัดกรีเป็นสาย "ทั่วไป" และหากคุณต้องการสร้างปุ่มเปิดปิดแยกต่างหากบนเคสก็เพียงแค่ใส่สวิตช์เข้าไปในช่องว่างของสายนี้ .

ตอนนี้คุณต้องดูว่าตัวเก็บประจุเอาต์พุตขนาดใหญ่มีราคากี่โวลต์หากพวกเขาบอกว่าน้อยกว่า 30v คุณจะต้องแทนที่ด้วยตัวที่คล้ายกันโดยมีแรงดันไฟฟ้าใช้งานอย่างน้อย 30 โวลต์เท่านั้น

ในภาพมีตัวเก็บประจุสีดำเป็นตัวเลือกทดแทนสำหรับสีน้ำเงิน
การดำเนินการนี้เนื่องจากหน่วยที่ดัดแปลงของเราจะผลิตไฟฟ้าได้ไม่ +12 โวลต์ แต่จะสูงถึง +24 โวลต์ และหากไม่มีการเปลี่ยน ตัวเก็บประจุจะระเบิดระหว่างการทดสอบครั้งแรกที่ 24 โวลต์ หลังจากใช้งานไปไม่กี่นาที เมื่อเลือกอิเล็กโทรไลต์ใหม่ ไม่แนะนำให้ลดความจุ แต่แนะนำให้เพิ่มเสมอ
ส่วนที่สำคัญที่สุดของงาน
เราจะถอดชิ้นส่วนที่ไม่จำเป็นทั้งหมดในชุดสายไฟ IC494 ออกและบัดกรีชิ้นส่วนที่ระบุอื่น ๆ เพื่อให้ผลลัพธ์ที่ได้คือชุดสายไฟเช่นนี้ (รูปที่ 1)

ข้าว. หมายเลข 1 การเปลี่ยนแปลงการเดินสายไฟของวงจรไมโคร IC 494 (รูปแบบการแก้ไข)
เราจะต้องมีขาของไมโครวงจรหมายเลข 1, 2, 3, 4, 15 และ 16 เท่านั้นอย่าไปสนใจส่วนที่เหลือ

ข้าว. หมายเลข 2 ตัวเลือกสำหรับการปรับปรุงตามตัวอย่างของโครงการหมายเลข 1
คำอธิบายของการกำหนด

คุณควรทำอะไรแบบนี้เราพบขาหมายเลข 1 (โดยที่จุดอยู่บนร่างกาย) ของไมโครวงจรและศึกษาสิ่งที่เชื่อมต่อกับมัน จะต้องถอดและตัดวงจรทั้งหมดออก ตัวเลือกการปรับเปลี่ยนที่เหมาะสมที่สุดนั้นขึ้นอยู่กับวิธีการวางรางและชิ้นส่วนที่บัดกรีในการดัดแปลงบอร์ดของคุณ นี่อาจเป็นการถอดและยกขาข้างหนึ่งของชิ้นส่วน (หักโซ่) หรือจะตัดง่ายกว่า ติดตามด้วยมีด เมื่อตัดสินใจเกี่ยวกับแผนปฏิบัติการแล้ว เราจะเริ่มกระบวนการปรับปรุงตามแผนการแก้ไข


ภาพถ่ายแสดงการแทนที่ตัวต้านทานด้วยค่าที่ต้องการ

ในภาพ - โดยการยกขาของส่วนที่ไม่จำเป็นขึ้นเราจะทำลายโซ่
ตัวต้านทานบางตัวที่บัดกรีในแผนภาพการเดินสายไฟแล้วอาจเหมาะสมโดยไม่ต้องเปลี่ยน ตัวอย่างเช่น เราจำเป็นต้องใส่ตัวต้านทานที่ R=2.7k ที่เชื่อมต่อกับ "ทั่วไป" แต่มี R=3k ที่เชื่อมต่อกับ "ทั่วไป" อยู่แล้ว ” สิ่งนี้เหมาะกับเราค่อนข้างดีและเราปล่อยให้มันไม่มีการเปลี่ยนแปลง (ตัวอย่างในรูปที่ 2 ตัวต้านทานสีเขียวไม่เปลี่ยนแปลง)


บนรูปภาพ- ตัดแทร็กและเพิ่มจัมเปอร์ใหม่ เขียนค่าเก่าด้วยเครื่องหมาย คุณอาจต้องคืนค่าทุกอย่างกลับคืน
ดังนั้นเราจึงตรวจสอบและทำซ้ำวงจรทั้งหมดบนขาทั้งหกของไมโครวงจร
นี่เป็นจุดที่ยากที่สุดในการปรับปรุงใหม่
เราสร้างตัวควบคุมแรงดันไฟฟ้าและกระแส

เราใช้ตัวต้านทานแบบแปรผัน 22k (ตัวควบคุมแรงดันไฟฟ้า) และ 330Ohm (ตัวควบคุมกระแส) บัดกรีสายไฟขนาด 15 ซม. สองเส้นเข้าด้วยกันบัดกรีปลายอีกด้านเข้ากับบอร์ดตามแผนภาพ (รูปที่ 1) ติดตั้งบนแผงด้านหน้า
การควบคุมแรงดันและกระแส
ในการควบคุมเราจำเป็นต้องมีโวลต์มิเตอร์ (0-30v) และแอมมิเตอร์ (0-6A)

อุปกรณ์เหล่านี้สามารถหาซื้อได้ในร้านค้าออนไลน์ของจีนในราคาที่ดีที่สุด โวลต์มิเตอร์ของฉันมีราคาเพียง 60 รูเบิลพร้อมจัดส่ง (โวลต์มิเตอร์: )

ฉันใช้แอมป์มิเตอร์ของตัวเองจากหุ้นล้าหลังเก่า
สำคัญ- ภายในอุปกรณ์จะมีตัวต้านทานกระแส (เซ็นเซอร์กระแส) ซึ่งเราต้องการตามแผนภาพ (รูปที่ 1) ดังนั้นหากคุณใช้แอมป์มิเตอร์ก็ไม่จำเป็นต้องติดตั้งตัวต้านทานกระแสไฟเพิ่มเติม จำเป็นต้องติดตั้งโดยไม่ต้องใช้แอมป์มิเตอร์ โดยปกติแล้ว RC แบบโฮมเมดจะทำขึ้น ลวด D = 0.5-0.6 มม. พันรอบความต้านทาน MLT 2 วัตต์ หมุนเพื่อหมุนตลอดความยาวทั้งหมด ประสานปลายเข้ากับขั้วต้านทานนั่นคือทั้งหมด
ทุกคนจะสร้างตัวเครื่องเพื่อตัวเอง
คุณสามารถปล่อยให้มันเป็นโลหะได้โดยการตัดรูสำหรับอุปกรณ์ควบคุมและอุปกรณ์ควบคุม ฉันใช้เศษลามิเนตซึ่งเจาะและตัดได้ง่ายกว่า
ไมโครวงจรที่เป็นปัญหาอยู่ในรายการวงจรอิเล็กทรอนิกส์รวมที่ใช้กันทั่วไปและใช้กันอย่างแพร่หลาย รุ่นก่อนคือคอนโทรลเลอร์ PWM ซีรีส์ UC38xx จาก Unitrode ในปี 1999 บริษัทนี้ถูกซื้อโดย Texas Instruments และตั้งแต่นั้นเป็นต้นมา การพัฒนากลุ่มผลิตภัณฑ์ตัวควบคุมเหล่านี้ก็เริ่มต้นขึ้น ซึ่งนำไปสู่การสร้างสรรค์ในช่วงต้นทศวรรษ 2000 วงจรไมโครซีรีย์ TL494 นอกเหนือจาก UPS ที่กล่าวถึงข้างต้นแล้ว ยังสามารถพบได้ในตัวควบคุมแรงดันไฟฟ้ากระแสตรง ไดรฟ์ควบคุม ซอฟต์สตาร์ทเตอร์ กล่าวง่ายๆ ก็คือ ไม่ว่าจะใช้การควบคุม PWM ที่ไหนก็ตาม
ในบรรดาบริษัทที่โคลนชิปนี้มีแบรนด์ที่มีชื่อเสียงระดับโลกเช่น Motorola, Inc, International Rectifier, Fairchild Semiconductor, ON Semiconductor ทั้งหมดนี้ให้คำอธิบายโดยละเอียดของผลิตภัณฑ์ ซึ่งเรียกว่าเอกสารข้อมูล TL494CN
เอกสารประกอบ
การวิเคราะห์คำอธิบายประเภทของไมโครวงจรที่เป็นปัญหาจากผู้ผลิตหลายรายแสดงให้เห็นถึงเอกลักษณ์เชิงปฏิบัติของคุณลักษณะของมัน จำนวนข้อมูลที่บริษัทต่างๆ ให้ไว้เกือบจะเท่ากัน นอกจากนี้ เอกสารข้อมูล TL494CN จากแบรนด์ต่างๆ เช่น Motorola, Inc และ ON Semiconductor จำลองซึ่งกันและกันในโครงสร้าง ตัวเลข ตาราง และกราฟ การนำเสนอเนื้อหาโดย Texas Instruments ค่อนข้างแตกต่างไปจากเนื้อหาเหล่านี้ แต่เมื่อการศึกษาอย่างรอบคอบ จะเห็นได้ชัดว่าเนื้อหาเหล่านี้หมายถึงผลิตภัณฑ์ที่เหมือนกัน
วัตถุประสงค์ของชิป TL494CN
ตามเนื้อผ้า เราจะเริ่มคำอธิบายโดยมีวัตถุประสงค์และรายการอุปกรณ์ภายใน เป็นตัวควบคุม PWM ความถี่คงที่ซึ่งมีจุดประสงค์หลักสำหรับการใช้งานของ UPS โดยมีอุปกรณ์ต่อไปนี้:
- เครื่องกำเนิดแรงดันไฟฟ้าฟันเลื่อย (RPG);
- เครื่องขยายสัญญาณข้อผิดพลาด
- แหล่งจ่ายแรงดันอ้างอิง +5 V;
- วงจรการปรับ "เวลาตาย";
- กระแสไฟขาออกสูงถึง 500 mA;
- โครงการเลือกโหมดการทำงานแบบหนึ่งจังหวะหรือสองจังหวะ
จำกัดพารามิเตอร์
เช่นเดียวกับวงจรไมโครอื่น ๆ คำอธิบาย TL494CN จำเป็นต้องมีรายการคุณลักษณะประสิทธิภาพสูงสุดที่อนุญาต ให้พวกเขาอ้างอิงจากข้อมูลจาก Motorola, Inc.:
- แรงดันไฟจ่าย: 42 โวลต์
- แรงดันสะสมของทรานซิสเตอร์เอาท์พุต: 42 V.
- กระแสไฟขาออกของตัวสะสมทรานซิสเตอร์: 500 mA
- ช่วงแรงดันไฟฟ้าอินพุตของเครื่องขยายเสียง: - 0.3 V ถึง +42 V
- การกระจายพลังงาน (ที่ t< 45 °C): 1000 мВт.
- ช่วงอุณหภูมิในการจัดเก็บ: ตั้งแต่ -55 ถึง +125 °C
- ช่วงอุณหภูมิแวดล้อมในการทำงาน: ตั้งแต่ 0 ถึง +70 °C
ควรสังเกตว่าพารามิเตอร์ 7 สำหรับชิป TL494IN นั้นกว้างกว่าเล็กน้อย: จาก -25 ถึง +85 °C
การออกแบบชิป TL494CN
คำอธิบายในภาษารัสเซียเกี่ยวกับข้อสรุปของที่อยู่อาศัยแสดงในรูปด้านล่าง
ไมโครวงจรถูกวางไว้ในพลาสติก (ระบุด้วยตัวอักษร N ที่ส่วนท้ายของการกำหนด) เคส 16 พินพร้อมพินประเภท PDP
ลักษณะที่ปรากฏอยู่ในภาพด้านล่าง

TL494CN: แผนภาพการทำงาน
ดังนั้น งานของวงจรขนาดเล็กนี้คือการปรับความกว้างพัลส์ (PWM หรือการปรับความกว้างพัลส์ (PWM)) ของพัลส์แรงดันไฟฟ้าที่สร้างขึ้นภายใน UPS ทั้งที่ได้รับการควบคุมและไม่ได้รับการควบคุม ตามกฎแล้วในการจ่ายไฟประเภทแรก ช่วงระยะเวลาพัลส์จะถึงค่าสูงสุดที่เป็นไปได้ (~ 48% สำหรับแต่ละเอาต์พุตในวงจรพุชพูล ซึ่งใช้กันอย่างแพร่หลายในการจ่ายไฟให้กับเครื่องขยายเสียงในรถยนต์)
ชิป TL494CN มีพินเอาต์พุตทั้งหมด 6 พิน โดย 4 พินในนั้น (1, 2, 15, 16) เป็นอินพุตไปยังตัวขยายข้อผิดพลาดภายในที่ใช้เพื่อปกป้อง UPS จากกระแสไฟเกินและที่อาจเกิดขึ้น พิน #4 เป็นอินพุตสัญญาณ 0 ถึง 3V เพื่อปรับรอบการทำงานของเอาต์พุตคลื่นสี่เหลี่ยม และ #3 เป็นเอาต์พุตตัวเปรียบเทียบและสามารถใช้ได้หลายวิธี อีก 4 (หมายเลข 8, 9, 10, 11) เป็นตัวสะสมและตัวปล่อยทรานซิสเตอร์อิสระที่มีกระแสโหลดสูงสุดที่อนุญาตคือ 250 mA (ในโหมดระยะยาวไม่เกิน 200 mA) สามารถเชื่อมต่อเป็นคู่ (9 กับ 10 และ 8 กับ 11) เพื่อควบคุมสนามพลังสูงด้วยกระแสสูงสุดที่อนุญาตที่ 500 mA (ไม่เกิน 400 mA ในโหมดต่อเนื่อง)
โครงสร้างภายในของ TL494CN คืออะไร? แผนภาพแสดงในรูปด้านล่าง

ไมโครเซอร์กิตมีแหล่งจ่ายแรงดันอ้างอิง (RES) +5 V (หมายเลข 14) ในตัว โดยปกติจะใช้เป็นแรงดันอ้างอิง (ที่มีความแม่นยำ ± 1%) ซึ่งจ่ายให้กับอินพุตของวงจรที่กินกระแสไม่เกิน 10 mA เช่น เพื่อพิน 13 สำหรับการเลือกโหมดการทำงานหนึ่งหรือสองรอบของ วงจรขนาดเล็ก: หากมี +5 V โหมดที่สองจะถูกเลือก หากมีแรงดันไฟฟ้าลบอยู่ - โหมดแรก
ในการปรับความถี่ของเครื่องกำเนิดแรงดันไฟฟ้าทางลาด (RVG) จะใช้ตัวเก็บประจุและตัวต้านทานเชื่อมต่อกับพิน 5 และ 6 ตามลำดับ และแน่นอนว่าไมโครเซอร์กิตมีพินสำหรับเชื่อมต่อบวกและลบของแหล่งจ่ายไฟ (หมายเลข 12 และ 7 ตามลำดับ) ในช่วงตั้งแต่ 7 ถึง 42 V
แผนภาพแสดงว่ามีอุปกรณ์ภายในอื่นๆ จำนวนหนึ่งใน TL494CN คำอธิบายเกี่ยวกับวัตถุประสงค์การใช้งานเป็นภาษารัสเซียจะแสดงไว้ด้านล่างเมื่อมีการนำเสนอเนื้อหา
ฟังก์ชันพินอินพุต
เช่นเดียวกับอุปกรณ์อิเล็กทรอนิกส์อื่นๆ ไมโครวงจรที่เป็นปัญหามีอินพุตและเอาต์พุตของตัวเอง เราจะเริ่มด้วยอันแรก รายการพิน TL494CN เหล่านี้ได้รับระบุไว้ข้างต้นแล้ว คำอธิบายวัตถุประสงค์การใช้งานในภาษารัสเซียจะได้รับด้านล่างพร้อมคำอธิบายโดยละเอียด
บทสรุป 1
นี่คืออินพุตบวก (ไม่กลับด้าน) ของตัวขยายข้อผิดพลาด 1 หากแรงดันไฟฟ้าต่ำกว่าแรงดันไฟฟ้าที่พิน 2 เอาต์พุตของตัวขยายข้อผิดพลาด 1 จะต่ำ หากสูงกว่าที่พิน 2 สัญญาณข้อผิดพลาดแอมพลิฟายเออร์ 1 จะสูง เอาต์พุตของแอมพลิฟายเออร์จะเป็นไปตามอินพุตเชิงบวกเป็นหลักโดยใช้พิน 2 เป็นข้อมูลอ้างอิง ฟังก์ชั่นของตัวขยายข้อผิดพลาดจะอธิบายรายละเอียดเพิ่มเติมด้านล่าง
บทสรุป 2
นี่คืออินพุตเชิงลบ (กลับด้าน) ของตัวขยายข้อผิดพลาด 1 หากพินนี้สูงกว่าพิน 1 เอาต์พุตของตัวขยายข้อผิดพลาด 1 จะต่ำ หากแรงดันไฟฟ้าบนพินนี้ต่ำกว่าแรงดันไฟฟ้าบนพิน 1 เอาต์พุตของเครื่องขยายเสียงจะสูง
บทสรุปที่ 15
มันทำงานเหมือนกับ #2 ทุกประการ บ่อยครั้งไม่ได้ใช้ตัวขยายข้อผิดพลาดตัวที่สองใน TL494CN วงจรการเชื่อมต่อในกรณีนี้ประกอบด้วยพิน 15 เพียงเชื่อมต่อกับ 14 (แรงดันอ้างอิง +5 V)
บทสรุปที่ 16
มันทำงานในลักษณะเดียวกับหมายเลข 1 โดยปกติจะแนบกับหมายเลข 7 ทั่วไปเมื่อไม่ได้ใช้ตัวขยายข้อผิดพลาดตัวที่สอง เมื่อเชื่อมต่อพิน 15 กับ +5V และเชื่อมต่อพิน 16 กับคอมมอน เอาต์พุตของแอมพลิฟายเออร์ตัวที่สองจะต่ำ ดังนั้นจึงไม่มีผลกระทบต่อการทำงานของชิป
บทสรุป 3
พินนี้และแอมพลิฟายเออร์ TL494CN ภายในแต่ละตัวเชื่อมต่อเข้าด้วยกันผ่านไดโอด หากสัญญาณที่เอาต์พุตของสัญญาณใด ๆ เปลี่ยนจากระดับต่ำไปสูง ดังนั้นที่หมายเลข 3 สัญญาณก็จะสูงเช่นกัน เมื่อสัญญาณที่พินนี้เกิน 3.3 V พัลส์เอาต์พุตจะถูกปิด (รอบการทำงานเป็นศูนย์) เมื่อแรงดันไฟฟ้าตกคร่อมใกล้ 0 V ระยะเวลาพัลส์จะสูงสุด ระหว่าง 0 ถึง 3.3 V ความกว้างพัลส์จะอยู่ระหว่าง 50% ถึง 0% (สำหรับเอาต์พุตคอนโทรลเลอร์ PWM แต่ละตัว - ที่พิน 9 และ 10 ในอุปกรณ์ส่วนใหญ่)
หากจำเป็น สามารถใช้พิน 3 เป็นสัญญาณอินพุตหรือสามารถใช้เพื่อจัดเตรียมการหน่วงสำหรับอัตราการเปลี่ยนแปลงความกว้างพัลส์ หากแรงดันไฟฟ้าสูง (> ~ 3.5V) ไม่มีทางที่จะสตาร์ท UPS บนตัวควบคุม PWM ได้ (จะไม่มีพัลส์จากนั้น)
บทสรุป 4
ควบคุมช่วงรอบการทำงานของพัลส์เอาท์พุต (English Dead-Time Control) หากแรงดันไฟฟ้าตกคร่อมใกล้กับ 0 V ไมโครวงจรจะสามารถส่งออกทั้งความกว้างพัลส์ขั้นต่ำที่เป็นไปได้และสูงสุด (ซึ่งกำหนดโดยสัญญาณอินพุตอื่น) หากใช้แรงดันไฟฟ้าประมาณ 1.5V กับพินนี้ ความกว้างพัลส์เอาท์พุตจะถูกจำกัดไว้ที่ 50% ของความกว้างสูงสุด (หรือรอบการทำงาน ~ 25% สำหรับโหมดตัวควบคุม PWM แบบพุชพูล) หากแรงดันไฟฟ้าสูง (>~3.5V) จะไม่มีทางสตาร์ท UPS บน TL494CN ได้ วงจรเชื่อมต่อมักมีหมายเลข 4 เชื่อมต่อโดยตรงกับกราวด์
- สิ่งสำคัญที่ต้องจำ- สัญญาณที่พิน 3 และ 4 ควรต่ำกว่า ~3.3 V แต่จะเกิดอะไรขึ้นหากอยู่ใกล้เช่น +5 V? TL494CN จะทำงานอย่างไร? วงจรแปลงแรงดันไฟฟ้าที่อยู่บนนั้นจะไม่สร้างพัลส์เช่น จะไม่มีแรงดันไฟเอาท์พุตจาก UPS
บทสรุป 5
ทำหน้าที่เชื่อมต่อตัวเก็บประจุไทม์มิ่ง Ct โดยที่หน้าสัมผัสที่สองเชื่อมต่อกับกราวด์ โดยทั่วไปค่าความจุจะอยู่ระหว่าง 0.01 µF ถึง 0.1 µF การเปลี่ยนแปลงค่าของส่วนประกอบนี้นำไปสู่การเปลี่ยนแปลงความถี่ของ GPG และพัลส์เอาท์พุตของตัวควบคุม PWM โดยทั่วไปจะใช้ตัวเก็บประจุคุณภาพสูงที่มีค่าสัมประสิทธิ์อุณหภูมิต่ำมาก (โดยมีการเปลี่ยนแปลงความจุตามอุณหภูมิน้อยมาก)
บทสรุป 6
ในการเชื่อมต่อตัวต้านทานการตั้งค่าไดรฟ์ Rt โดยที่หน้าสัมผัสที่สองเชื่อมต่อกับกราวด์ ค่าของ Rt และ Ct กำหนดความถี่ของ FPG
- f = 1.1: (Rt x Ct)
บทสรุป 7
เชื่อมต่อกับสายสามัญของวงจรอุปกรณ์บนตัวควบคุม PWM
บทสรุปที่ 12
มีเครื่องหมายอักษร VCC เชื่อมต่อกับ "บวก" ของแหล่งจ่ายไฟ TL494CN วงจรเชื่อมต่อมักจะมีหมายเลข 12 ซึ่งเชื่อมต่อกับสวิตช์จ่ายไฟ UPS จำนวนมากใช้หมุดนี้เพื่อเปิดและปิดเครื่อง (และตัว UPS เอง) หากมี +12 V และต่อสายดินหมายเลข 7 ไมโครวงจร GPN และ ION จะทำงาน
บทสรุปที่ 13
นี่คืออินพุตโหมดการทำงาน การทำงานของมันถูกอธิบายไว้ข้างต้น
ฟังก์ชั่นพินเอาท์พุต
รายการเหล่านี้ยังระบุไว้ข้างต้นสำหรับ TL494CN คำอธิบายวัตถุประสงค์การใช้งานในภาษารัสเซียจะได้รับด้านล่างพร้อมคำอธิบายโดยละเอียด
บทสรุป 8
ชิปนี้มีทรานซิสเตอร์ NPN 2 ตัวซึ่งเป็นสวิตช์เอาต์พุต พินนี้เป็นตัวสะสมของทรานซิสเตอร์ 1 ซึ่งมักจะเชื่อมต่อกับแหล่งจ่ายแรงดันไฟฟ้าคงที่ (12 V) อย่างไรก็ตามในวงจรของอุปกรณ์บางตัวจะใช้เป็นเอาต์พุตและคุณสามารถเห็นคลื่นสี่เหลี่ยมได้ (ตามหมายเลข 11)
บทสรุป 9
นี่คือตัวปล่อยของทรานซิสเตอร์ 1 โดยจะขับเคลื่อนทรานซิสเตอร์กำลังของ UPS (FET ในกรณีส่วนใหญ่) ในวงจรพุช-พูล ไม่ว่าจะโดยตรงหรือผ่านทรานซิสเตอร์ตัวกลาง
บทสรุปที่ 10
นี่คือตัวปล่อยของทรานซิสเตอร์ 2 ในโหมดรอบเดียวสัญญาณจะเหมือนกับหมายเลข 9 ในโหมดกดดึงสัญญาณบนหมายเลข 9 และ 10 จะเป็นแอนติเฟสนั่นคือเมื่อระดับสัญญาณ สูงที่หนึ่ง แล้วก็ต่ำที่อีกที่หนึ่ง และในทางกลับกัน ในอุปกรณ์ส่วนใหญ่ สัญญาณจากตัวส่งสัญญาณของสวิตช์ทรานซิสเตอร์เอาท์พุตของไมโครวงจรในคำถามจะควบคุมทรานซิสเตอร์เอฟเฟกต์สนามทรงพลังซึ่งจะเปิดเมื่อแรงดันไฟฟ้าที่พิน 9 และ 10 สูง (สูงกว่า ~ 3.5 V แต่ไม่ได้อยู่ใน เกี่ยวข้องกับระดับ 3.3 V ที่หมายเลข 3 และ 4 แต่อย่างใด)
บทสรุปที่ 11
นี่คือตัวสะสมของทรานซิสเตอร์ 2 ซึ่งมักจะเชื่อมต่อกับแหล่งจ่ายแรงดันคงที่ (+12 V)
- บันทึก: ในอุปกรณ์ที่ใช้ TL494CN วงจรการเชื่อมต่ออาจมีทั้งตัวสะสมและตัวปล่อยของทรานซิสเตอร์ 1 และ 2 เป็นเอาต์พุตของตัวควบคุม PWM แม้ว่าตัวเลือกที่สองจะพบได้บ่อยกว่าก็ตาม อย่างไรก็ตาม มีตัวเลือกเมื่อเอาต์พุตเป็นพิน 8 และ 11 ทุกประการ หากคุณพบหม้อแปลงขนาดเล็กในวงจรระหว่างวงจรไมโครและทรานซิสเตอร์สนามแม่เหล็กสัญญาณเอาท์พุตมักจะถูกนำมาจากพวกมัน (จากตัวสะสม)
บทสรุปที่ 14
นี่คือเอาต์พุต ION ตามที่อธิบายไว้ข้างต้นด้วย
หลักการทำงาน
ชิป TL494CN ทำงานอย่างไร เราจะให้คำอธิบายวิธีการทำงานโดยอ้างอิงจากวัสดุจาก Motorola, Inc. เอาต์พุตมอดูเลตความกว้างพัลส์ทำได้โดยการเปรียบเทียบสัญญาณทางลาดเชิงบวกจากตัวเก็บประจุ Ct กับสัญญาณควบคุมสัญญาณใดสัญญาณหนึ่งจากสองสัญญาณ วงจรลอจิก NOR ควบคุมทรานซิสเตอร์เอาท์พุต Q1 และ Q2 โดยจะเปิดเฉพาะเมื่อสัญญาณที่อินพุตนาฬิกา (C1) ของฟลิปฟล็อป (ดูแผนภาพการทำงานของ TL494CN) ลดต่ำลง
ดังนั้นหากอินพุต C1 ของทริกเกอร์อยู่ที่ระดับลอจิคัล ทรานซิสเตอร์เอาต์พุตจะถูกปิดในโหมดการทำงานทั้งสอง: รอบเดียวและแบบพุชพูล หากมีสัญญาณที่อินพุตนี้ ในโหมดพุชพูล ทรานซิสเตอร์จะเปิดทีละตัวเมื่อคัตออฟของพัลส์นาฬิกามาถึงที่ทริกเกอร์ ในโหมด single-ended จะไม่มีการใช้ฟลิปฟล็อป และสวิตช์เอาต์พุตทั้งสองจะเปิดพร้อมกัน
สถานะเปิดนี้ (ในทั้งสองโหมด) เป็นไปได้เฉพาะในช่วงเวลา GPG เท่านั้น เมื่อแรงดันไฟฟ้าของฟันเลื่อยมากกว่าสัญญาณควบคุม ดังนั้นการเพิ่มหรือลดค่าของสัญญาณควบคุมทำให้เกิดการเพิ่มขึ้นหรือลดลงเชิงเส้นที่สอดคล้องกันของความกว้างของพัลส์แรงดันไฟฟ้าที่เอาต์พุตของวงจรไมโคร
แรงดันไฟฟ้าจากพิน 4 (การควบคุมเวลาตาย) อินพุตของเครื่องขยายข้อผิดพลาด หรืออินพุตสัญญาณป้อนกลับจากพิน 3 สามารถใช้เป็นสัญญาณควบคุมได้
ขั้นตอนแรกในการทำงานกับไมโครวงจร
ก่อนที่จะสร้างอุปกรณ์ที่มีประโยชน์ใดๆ ขอแนะนำให้เรียนรู้วิธีการทำงานของ TL494CN จะตรวจสอบการทำงานของมันได้อย่างไร?
นำเขียงหั่นขนมของคุณติดตั้งชิปลงไปแล้วเชื่อมต่อสายไฟตามแผนภาพด้านล่าง

หากเชื่อมต่อทุกอย่างถูกต้อง วงจรก็จะทำงาน ปล่อยพิน 3 และ 4 ไว้ไม่ว่าง ใช้ออสซิลโลสโคปเพื่อตรวจสอบการทำงานของ GPG - คุณควรเห็นแรงดันฟันเลื่อยที่พิน 6 ผลลัพธ์จะเป็นศูนย์ วิธีตรวจสอบประสิทธิภาพใน TL494CN สามารถตรวจสอบได้ดังนี้:
- เชื่อมต่อเอาต์พุตป้อนกลับ (หมายเลข 3) และเอาต์พุตควบคุมเวลาตาย (หมายเลข 4) เข้ากับขั้วต่อร่วม (หมายเลข 7)
- ตอนนี้คุณควรตรวจจับพัลส์สี่เหลี่ยมที่เอาต์พุตของไมโครเซอร์กิต
จะขยายสัญญาณเอาท์พุตได้อย่างไร?
เอาต์พุตของ TL494CN มีกระแสไฟค่อนข้างต่ำ และแน่นอนว่าคุณต้องการกำลังมากขึ้น ดังนั้นเราจึงต้องเพิ่มทรานซิสเตอร์กำลังเข้าไป วิธีที่ง่ายที่สุดในการใช้งาน (และหาได้ง่ายมาก - จากเมนบอร์ดคอมพิวเตอร์รุ่นเก่า) คือ MOSFET กำลังแบบ n-channel ในเวลาเดียวกันเราจะต้องกลับด้านเอาต์พุตของ TL494CN เพราะถ้าเราเชื่อมต่อ MOSFET n-channel เข้ากับมัน จากนั้นหากไม่มีพัลส์ที่เอาต์พุตของ microcircuit มันจะเปิดให้กับการไหลของกระแสตรง . มันอาจจะไหม้... ดังนั้นเราจึงนำทรานซิสเตอร์ NPN สากลออกมาแล้วเชื่อมต่อตามแผนภาพด้านล่าง

กำลัง MOSFET ในวงจรนี้ถูกควบคุมในโหมดพาสซีฟ ไม่ค่อยดีนัก แต่สำหรับการทดสอบและการใช้พลังงานต่ำก็ถือว่าใช้ได้ R1 ในวงจรคือโหลดของทรานซิสเตอร์ NPN เลือกตามกระแสสะสมสูงสุดที่อนุญาต R2 แสดงถึงภาระของระดับพลังงานของเรา ในการทดลองต่อไปนี้จะถูกแทนที่ด้วยหม้อแปลงไฟฟ้า
หากตอนนี้เราดูสัญญาณที่พิน 6 ของไมโครเซอร์กิตด้วยออสซิลโลสโคป เราจะเห็น "เลื่อย" ที่หมายเลข 8 (K1) คุณยังคงเห็นพัลส์สี่เหลี่ยมและที่ท่อระบายน้ำของทรานซิสเตอร์ MOS จะมีพัลส์ที่มีรูปร่างเหมือนกัน แต่มีขนาดใหญ่กว่า
จะเพิ่มแรงดันเอาต์พุตได้อย่างไร?
ตอนนี้เรามาดูแรงดันไฟฟ้าที่สูงขึ้นโดยใช้ TL494CN แผนภาพการสลับและการเดินสายไฟเหมือนกัน - บนเขียงหั่นขนม แน่นอนว่าเป็นไปไม่ได้ที่จะได้รับแรงดันไฟฟ้าที่สูงเพียงพอ โดยเฉพาะอย่างยิ่งเนื่องจากไม่มีฮีทซิงค์บนทรานซิสเตอร์กำลัง MOS และยังเชื่อมต่อหม้อแปลงขนาดเล็กเข้ากับสเตจเอาท์พุตตามแผนภาพนี้

ขดลวดปฐมภูมิของหม้อแปลงมี 10 รอบ ขดลวดทุติยภูมิมีประมาณ 100 รอบ ดังนั้นอัตราส่วนการแปลงคือ 10 ถ้าคุณใช้ 10V กับตัวหลัก คุณควรจะได้เอาต์พุตประมาณ 100V แกนทำจากเฟอร์ไรต์ คุณสามารถใช้คอร์ขนาดกลางจากหม้อแปลงจ่ายไฟของพีซี
ระวัง เอาต์พุตของหม้อแปลงอยู่ภายใต้ไฟฟ้าแรงสูง กระแสน้ำต่ำมากและจะไม่ฆ่าคุณ แต่คุณสามารถตีได้ดี อันตรายอีกประการหนึ่งคือหากคุณติดตั้งตัวเก็บประจุขนาดใหญ่ที่เอาต์พุต มันจะสะสมประจุจำนวนมาก ดังนั้นเมื่อปิดวงจรแล้วจึงควรคายประจุ
ที่เอาต์พุตของวงจรคุณสามารถเปิดตัวบ่งชี้ใด ๆ เช่นหลอดไฟได้ดังภาพด้านล่าง

มันทำงานโดยใช้แรงดันไฟฟ้ากระแสตรงและต้องใช้ไฟประมาณ 160 โวลต์ในการส่องสว่าง (แหล่งจ่ายไฟสำหรับอุปกรณ์ทั้งหมดคือประมาณ 15 V - ลำดับความสำคัญต่ำกว่า)
วงจรที่มีเอาต์พุตหม้อแปลงใช้กันอย่างแพร่หลายใน UPS ทุกรุ่นรวมถึงแหล่งจ่ายไฟของพีซี ในอุปกรณ์เหล่านี้ หม้อแปลงตัวแรกที่เชื่อมต่อผ่านสวิตช์ทรานซิสเตอร์ไปยังเอาต์พุตของตัวควบคุม PWM ทำหน้าที่แยกส่วนแรงดันไฟฟ้าต่ำของวงจร รวมถึง TL494CN ออกจากชิ้นส่วนไฟฟ้าแรงสูงที่มีหม้อแปลงแรงดันไฟหลัก
เครื่องปรับแรงดันไฟฟ้า
ตามกฎแล้วในอุปกรณ์อิเล็กทรอนิกส์ขนาดเล็กที่ทำเองที่บ้านนั้น UPS พีซีมาตรฐานที่ผลิตบน TL494CN จะจ่ายไฟให้ แผนภาพการเชื่อมต่อสำหรับแหล่งจ่ายไฟของพีซีเป็นที่รู้จักกันดี และสามารถเข้าถึงตัวเครื่องได้อย่างง่ายดาย เนื่องจากมีพีซีเก่าหลายล้านเครื่องถูกทิ้งทุกปีหรือขายเป็นอะไหล่ แต่ตามกฎแล้ว UPS เหล่านี้จะผลิตแรงดันไฟฟ้าไม่สูงกว่า 12 V ซึ่งต่ำเกินไปสำหรับไดรฟ์ความถี่แบบแปรผัน แน่นอน คุณสามารถลองใช้ PC UPS ที่มีแรงดันไฟฟ้าสูงกว่าสำหรับ 25V ได้ แต่จะหายาก และพลังงานที่มากเกินไปจะกระจายไปที่ 5V ในลอจิกเกต
อย่างไรก็ตาม สำหรับ TL494 (หรือแอนะล็อก) คุณสามารถสร้างวงจรใดๆ ที่มีเอาต์พุตที่มีกำลังและแรงดันไฟฟ้าเพิ่มขึ้นได้ การใช้ชิ้นส่วนทั่วไปจาก PC UPS และ MOSFET กำลังไฟจากเมนบอร์ด คุณสามารถสร้างตัวควบคุมแรงดันไฟฟ้า PWM โดยใช้ TL494CN วงจรคอนเวอร์เตอร์แสดงในรูปด้านล่าง

คุณสามารถดูแผนภาพวงจรของไมโครวงจรและระยะเอาท์พุตโดยใช้ทรานซิสเตอร์สองตัว: npn สากลและ MOS อันทรงพลัง
ชิ้นส่วนหลัก: T1, Q1, L1, D1 ไบโพลาร์ T1 ใช้เพื่อควบคุม MOSFET กำลังที่เชื่อมต่อด้วยวิธีที่เรียบง่ายหรือที่เรียกว่า "เฉยๆ" L1 เป็นโช้คแบบเหนี่ยวนำจากเครื่องพิมพ์ HP รุ่นเก่า (ประมาณ 50 รอบ สูง 1 ซม. กว้าง 0.5 ซม. พร้อมขดลวด โช้คแบบเปิด) D1 มาจากอุปกรณ์อื่น TL494 เชื่อมต่อด้วยวิธีอื่นจากที่กล่าวมาข้างต้น แม้ว่าจะใช้วิธีใดวิธีหนึ่งก็ได้ก็ตาม
C8 เป็นตัวเก็บประจุขนาดเล็กเพื่อป้องกันเสียงรบกวนที่เข้าสู่อินพุตของเครื่องขยายข้อผิดพลาด ค่า 0.01uF จะเป็นปกติไม่มากก็น้อย ค่าที่มากขึ้นจะทำให้การตั้งค่าแรงดันไฟฟ้าที่ต้องการช้าลง
C6 เป็นตัวเก็บประจุที่มีขนาดเล็กกว่า มันถูกใช้เพื่อกรองสัญญาณรบกวนความถี่สูง ความจุของมันสูงถึงหลายร้อยพิโคฟารัด
โครงการนี้เป็นหนึ่งในโครงการที่ยาวที่สุดที่ฉันเคยทำ มีคนคนหนึ่งสั่งแหล่งจ่ายไฟสำหรับเพาเวอร์แอมป์
ก่อนหน้านี้ฉันไม่เคยมีโอกาสสร้างเครื่องกำเนิดพัลส์ที่ทรงพลังขนาดนี้มาก่อนแม้ว่าฉันจะมีประสบการณ์ในการประกอบก็ตาม ไอไอพีค่อนข้างใหญ่. มีปัญหามากมายระหว่างการประกอบ ในตอนแรกฉันอยากจะบอกว่ารูปแบบนี้มักพบบนอินเทอร์เน็ตหรืออย่างแม่นยำยิ่งขึ้นบนเว็บไซต์ในช่วงเวลาหนึ่ง แต่.... ในตอนแรกรูปแบบไม่เหมาะมีข้อผิดพลาดและส่วนใหญ่จะไม่ทำงานหากคุณประกอบ มันตรงตามแบบแผนจากเว็บไซต์
โดยเฉพาะอย่างยิ่ง ฉันเปลี่ยนไดอะแกรมการเชื่อมต่อเครื่องกำเนิดไฟฟ้า และนำไดอะแกรมจากแผ่นข้อมูล ฉันเปลี่ยนหน่วยจ่ายไฟของวงจรควบคุมใหม่ แทนที่จะใช้ตัวต้านทาน 2 วัตต์ที่เชื่อมต่อแบบขนาน ฉันใช้ SMPS ขนาด 15 โวลต์ 2 แอมแปร์แยกต่างหาก ซึ่งทำให้สามารถกำจัดความยุ่งยากมากมายได้
ฉันเปลี่ยนส่วนประกอบบางอย่างเพื่อให้เหมาะกับความสะดวกของฉัน และเปิดตัวทุกอย่างเป็นส่วนๆ โดยกำหนดค่าแต่ละโหนดแยกกัน
คำไม่กี่คำเกี่ยวกับการออกแบบแหล่งจ่ายไฟ นี่คือแหล่งจ่ายไฟเครือข่ายสวิตชิ่งที่ทรงพลังโดยใช้โทโพโลยีแบบบริดจ์ มีเสถียรภาพแรงดันไฟฟ้าเอาท์พุต การป้องกันการลัดวงจรและการโอเวอร์โหลด ฟังก์ชั่นทั้งหมดเหล่านี้สามารถปรับได้
กำลังไฟในกรณีของฉันคือ 2,000 วัตต์ แต่วงจรสามารถเอาพลังงานได้ถึง 4,000 วัตต์ได้อย่างง่ายดายหากคุณเปลี่ยนกุญแจ สะพาน และเติมอิเล็กโทรไลต์ 4,000 uF ในส่วนของอิเล็กโทรไลต์ ความจุจะถูกเลือกตามการคำนวณ 1 วัตต์ - 1 µF
สะพานไดโอด - 30 แอมแปร์ 1,000 โวลต์ - ชุดประกอบสำเร็จรูปมีการไหลเวียนของอากาศแยกต่างหาก (ตัวทำความเย็น)
ฟิวส์หลัก 25-30 แอมแปร์
ทรานซิสเตอร์ - IRFP460ให้ลองเลือกทรานซิสเตอร์ที่มีแรงดันไฟฟ้า 450-700 Volts โดยมีค่าความจุเกตต่ำสุดและความต้านทานต่ำสุดของช่องเปิดของสวิตช์ ในกรณีของฉัน ปุ่มเหล่านี้เป็นเพียงตัวเลือกเดียว แม้ว่าในวงจรบริดจ์ คีย์เหล่านี้สามารถให้พลังงานตามที่กำหนดได้ ติดตั้งบนแผงระบายความร้อนทั่วไปโดยต้องแยกออกจากกัน
รีเลย์โหมดซอฟต์สตาร์ท - 30 แอมป์พร้อมคอยล์ 12 โวลต์ ในตอนแรก เมื่อเครื่องเชื่อมต่อกับเครือข่าย 220 โวลต์ กระแสสตาร์ทจะสูงมากจนสามารถเผาบริดจ์และอื่นๆ อีกมากมายได้ ดังนั้นจึงจำเป็นต้องมีโหมดสตาร์ทแบบนุ่มนวลสำหรับการจ่ายไฟในระดับนี้ เมื่อเชื่อมต่อกับเครือข่ายผ่านตัวต้านทานแบบจำกัด (ในกรณีของฉันคือโซ่ของตัวต้านทานที่เชื่อมต่อแบบอนุกรม 3x22Ohm 5 วัตต์) อิเล็กโทรไลต์จะถูกชาร์จ เมื่อแรงดันไฟฟ้าสูงเพียงพอ แหล่งจ่ายไฟของวงจรควบคุม (15 โวลต์ 2 แอมแปร์) จะถูกเปิดใช้งานซึ่งจะปิดรีเลย์และจ่ายไฟหลัก (กำลัง) ให้กับวงจรผ่านทางด้านหลัง
Transformer - ในกรณีของฉันบน 4 วง 45x28x8 2000NM แกนไม่สำคัญและทุกสิ่งที่เชื่อมต่อกับมันจะต้องคำนวณโดยใช้โปรแกรมพิเศษเช่นเดียวกับโช้คเอาท์พุตของการรักษาเสถียรภาพกลุ่ม
อุปกรณ์ของฉันมีขดลวด 3 เส้น ซึ่งทั้งหมดมีแรงดันไฟฟ้าแบบไบโพลาร์ ขดลวดแรก (หลัก, กำลังไฟ) คือ +/-45 โวลต์ที่มีกระแส 20 แอมป์ - สำหรับจ่ายไฟให้กับสเตจเอาต์พุตหลัก (แอมพลิฟายเออร์ปัจจุบัน) ของ UMZCH, +/-55 โวลต์ที่สอง 1.5 แอมป์ - สำหรับจ่ายไฟให้กับ ระยะต่างของแอมพลิฟายเออร์ช่วงที่สาม +/- 15 สำหรับจ่ายไฟให้กับชุดตัวกรอง
เครื่องกำเนิดไฟฟ้าถูกสร้างขึ้นบน ทีแอล494ปรับเป็น 80 kHz เกินกว่าไดรเวอร์ IR2110เพื่อจัดการคีย์
หม้อแปลงกระแสไฟฟ้าพันอยู่บนวงแหวน 2000NM 20x12x6 - ขดลวดทุติยภูมิพันด้วยลวด MGTF ขนาด 0.3 มม. และประกอบด้วย 2x45 รอบ
ในส่วนเอาต์พุตทุกอย่างเป็นมาตรฐานใช้บริดจ์ของไดโอด KD2997 เป็นวงจรเรียงกระแสสำหรับขดลวดกำลังหลัก - ด้วยกระแส 30 แอมแปร์ สะพานสำหรับขดลวด 55 โวลต์คือไดโอด UF5408 และสำหรับขดลวด 15 โวลต์พลังงานต่ำ - UF4007 ใช้เฉพาะไดโอดที่เร็วหรือเร็วมากเท่านั้น แม้ว่าคุณจะสามารถใช้พัลส์ไดโอดปกติที่มีแรงดันย้อนกลับอย่างน้อย 150-200 โวลต์ (แรงดันและกระแสของไดโอดขึ้นอยู่กับพารามิเตอร์ของขดลวด)
ตัวเก็บประจุหลังวงจรเรียงกระแสมีราคา 100 โวลต์ (โดยมีระยะขอบ) ความจุคือ 1,000 μF แต่แน่นอนว่าจะมีมากกว่านั้นบนบอร์ดเครื่องขยายเสียงเอง
การแก้ปัญหาวงจรเริ่มต้น
ฉันจะไม่ให้ไดอะแกรมของฉันเนื่องจากมันไม่แตกต่างจากที่ระบุไว้มากนัก ฉันจะบอกว่าในวงจร 15 เราปลดหมุด TL ออกจาก 16 แล้วบัดกรีเข้ากับพิน 13/14 ต่อไปเราจะถอดตัวต้านทาน R16/19/20/22 2 วัตต์ออกและจ่ายไฟให้กับชุดควบคุมด้วยแหล่งจ่ายไฟแยกต่างหาก 16-18 โวลต์ 1-2 แอมแปร์
เราเปลี่ยนตัวต้านทาน R29 ด้วย 6.8-10 kOhm เราแยกปุ่ม SA3/SA4 ออกจากวงจร (ไม่ว่าในกรณีใดจะทำให้ปุ่มดังกล่าวลัดวงจร! จะมีการบูม!) เราแทนที่ R8/R9 - พวกมันจะไหม้ในครั้งแรกที่เชื่อมต่อดังนั้นเราจึงแทนที่ด้วยตัวต้านทาน 5 วัตต์ 47-68 โอห์ม คุณสามารถใช้ตัวต้านทานที่เชื่อมต่อแบบอนุกรมหลายตัวด้วยกำลังที่ระบุ
R42 - แทนที่ด้วยซีเนอร์ไดโอดด้วยแรงดันไฟฟ้าคงที่ที่ต้องการ ฉันขอแนะนำอย่างยิ่งให้ใช้ตัวต้านทานแบบปรับค่าได้ทั้งหมดในวงจรแบบหลายเทิร์นเพื่อการตั้งค่าที่แม่นยำที่สุด
ขีด จำกัด ขั้นต่ำสำหรับการรักษาแรงดันไฟฟ้าคือ 18-25 โวลต์จากนั้นการสร้างจะล้มเหลว
บทความนี้จัดทำขึ้นโดยอ้างอิงจากหนังสือโดย A. V. GOLOVKOV และ V. B LYUBITSKY “แหล่งจ่ายไฟสำหรับโมดูลระบบของ IBM PC-XT/AT TYPE” สำนักพิมพ์ “LAD&N” มอสโก 1995 ดาวน์โหลดในรูปแบบอิเล็กทรอนิกส์จากอินเทอร์เน็ต
ไอซีคอนโทรล TL494
ใน UPS สมัยใหม่ วงจรรวมเฉพาะ (IC) มักจะใช้เพื่อสร้างแรงดันไฟฟ้าควบคุมสำหรับการสลับทรานซิสเตอร์กำลังของคอนเวอร์เตอร์
IC ควบคุมที่เหมาะสมที่สุดเพื่อให้แน่ใจว่าการทำงานปกติของ UPS ในโหมด PWM ควรเป็นไปตามเงื่อนไขส่วนใหญ่ต่อไปนี้:
แรงดันไฟฟ้าปฏิบัติการไม่สูงกว่า 40V;
การมีอยู่ของแหล่งกำเนิดแรงดันอ้างอิงที่มีความเสถียรทางความร้อนที่มีความเสถียรสูง
การมีเครื่องกำเนิดแรงดันไฟฟ้าฟันเลื่อย
ให้ความสามารถในการซิงโครไนซ์ซอฟต์สตาร์ทที่ตั้งโปรแกรมได้กับสัญญาณภายนอก
การมีเครื่องขยายสัญญาณที่ไม่ตรงกันพร้อมแรงดันไฟฟ้าโหมดร่วมสูง
การมีอยู่ของตัวเปรียบเทียบ PWM;
การปรากฏตัวของทริกเกอร์ควบคุมชีพจร
การปรากฏตัวของน้ำตกก่อนเทอร์มินัลสองช่องสัญญาณพร้อมการป้องกันไฟฟ้าลัดวงจร
การปรากฏตัวของตรรกะการปราบปรามชีพจรคู่;
ความพร้อมใช้งานของวิธีการแก้ไขความสมมาตรของแรงดันไฟขาออก
การมีอยู่ของข้อ จำกัด ในปัจจุบันในช่วงแรงดันไฟฟ้าโหมดทั่วไปที่หลากหลายตลอดจนข้อ จำกัด ปัจจุบันในแต่ละช่วงเวลาที่ปิดเครื่องในโหมดฉุกเฉิน
ความพร้อมใช้งานของการควบคุมอัตโนมัติพร้อมระบบส่งกำลังโดยตรง
รับประกันการปิดเครื่องเมื่อแรงดันไฟฟ้าลดลง
ให้การป้องกันไฟกระชาก
รับประกันความเข้ากันได้กับตรรกะ TTL/CMOS
ให้การเปิดและปิดระยะไกล
รูปที่ 11. ชิปควบคุม TL494 และ pinout
ในกรณีส่วนใหญ่ ไมโครวงจรประเภท TL494CN ที่ผลิตโดย TEXAS INSTRUMENT (USA) จะถูกใช้เป็นวงจรควบคุมสำหรับคลาสของ UPS ที่อยู่ระหว่างการพิจารณา (รูปที่ 11) ใช้ฟังก์ชันส่วนใหญ่ที่ระบุไว้ข้างต้น และผลิตโดยบริษัทต่างประเทศจำนวนหนึ่งภายใต้ชื่อที่แตกต่างกัน ตัวอย่างเช่น บริษัท SHARP (ญี่ปุ่น) ผลิตไมโครวงจร IR3M02, บริษัท FAIRCHILD (USA) - UA494, บริษัท SAMSUNG (เกาหลี) - KA7500, บริษัท FUJITSU (ญี่ปุ่น) - MB3759 เป็นต้น ไมโครวงจรทั้งหมดเหล่านี้เป็นอะนาล็อกที่สมบูรณ์ของไมโครวงจร KR1114EU4 ในประเทศ ให้เราพิจารณารายละเอียดเกี่ยวกับการออกแบบและการทำงานของชิปควบคุมนี้ ได้รับการออกแบบมาเป็นพิเศษเพื่อควบคุมส่วนจ่ายไฟของ UPS และมี (รูปที่ 12):
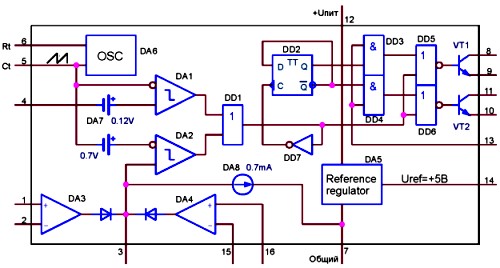
รูปที่ 12 แผนภาพการทำงานของไอซี TL494
เครื่องกำเนิดแรงดันไฟฟ้าทางลาด DA6; ความถี่ GPG ถูกกำหนดโดยค่าของตัวต้านทานและตัวเก็บประจุที่เชื่อมต่อกับพินที่ 5 และ 6 และในระดับของแหล่งจ่ายไฟที่พิจารณาจะถูกเลือกให้อยู่ที่ประมาณ 60 kHz
แหล่งจ่ายแรงดันอ้างอิงที่เสถียร DA5 (Uref=+5,OB) พร้อมเอาต์พุตภายนอก (พิน 14)
ตัวเปรียบเทียบโซนตาย DA1;
เครื่องเปรียบเทียบ PWM DA2;
เครื่องขยายสัญญาณข้อผิดพลาดแรงดันไฟฟ้า DA3;
เครื่องขยายข้อผิดพลาดสำหรับสัญญาณจำกัดกระแส DA4;
ทรานซิสเตอร์เอาต์พุตสองตัว VT1 และ VT2 พร้อมตัวสะสมและตัวปล่อยแบบเปิด
D-trigger แบบ push-pull แบบไดนามิกในโหมดการแบ่งความถี่ 2 - DD2;
องค์ประกอบลอจิกเสริม DD1 (2-OR), DD3 (2ND), DD4 (2ND), DD5 (2-OR-NOT), DD6 (2-OR-NOT), DD7 (NOT);
แหล่งจ่ายแรงดันคงที่ที่มีระดับ 0.1BDA7;
แหล่งจ่ายไฟ DC ที่มีค่าระบุ 0.7 mA DA8
วงจรควบคุมจะเริ่มขึ้นเช่น ลำดับของพัลส์จะปรากฏบนพิน 8 และ 11 หากแรงดันไฟฟ้าจ่ายไปที่พิน 12 ซึ่งระดับนั้นอยู่ในช่วงตั้งแต่ +7 ถึง +40 V สามารถแบ่งชุดฟังก์ชันการทำงานทั้งหมดที่รวมอยู่ใน TL494 IC ได้ เป็นส่วนดิจิทัลและแอนะล็อก (เส้นทางสัญญาณดิจิทัลและแอนะล็อก) ส่วนอะนาล็อกประกอบด้วยตัวขยายข้อผิดพลาด DA3, DA4, ตัวเปรียบเทียบ DA1, DA2, เครื่องกำเนิดแรงดันไฟฟ้าฟันเลื่อย DA6 รวมถึงแหล่งเสริม DA5, DA7, DA8 องค์ประกอบอื่นๆ ทั้งหมด รวมถึงทรานซิสเตอร์เอาท์พุต จะสร้างชิ้นส่วนดิจิทัล (เส้นทางดิจิทัล)
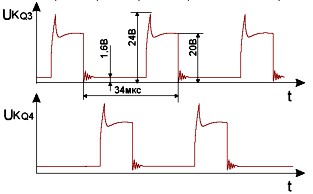
รูปที่ 13 การทำงานของ TL494 IC ในโหมดระบุ: U3, U4, U5 - แรงดันไฟฟ้าที่พิน 3, 4, 5
ให้เราพิจารณาการทำงานของเส้นทางดิจิทัลก่อน ไดอะแกรมกำหนดเวลาที่อธิบายการทำงานของไมโครวงจรจะแสดงในรูปที่ 1 13. จากแผนภาพเวลาเป็นที่ชัดเจนว่าช่วงเวลาที่ปรากฏของพัลส์ควบคุมเอาต์พุตของวงจรไมโครตลอดจนระยะเวลา (แผนภาพ 12 และ 13) ถูกกำหนดโดยสถานะของเอาต์พุตขององค์ประกอบลอจิคัล DD1 (แผนภาพ 5 ). "ลอจิก" ที่เหลือทำหน้าที่เสริมในการแบ่งพัลส์เอาท์พุตของ DD1 ออกเป็นสองช่องสัญญาณเท่านั้น ในกรณีนี้ระยะเวลาของพัลส์เอาต์พุตของวงจรไมโครจะถูกกำหนดโดยระยะเวลาของสถานะเปิดของทรานซิสเตอร์เอาต์พุต VT1, VT2 เนื่องจากทรานซิสเตอร์ทั้งสองชนิดนี้มีตัวสะสมและตัวปล่อยแบบเปิด จึงสามารถเชื่อมต่อได้สองวิธี เมื่อเปิดสวิตช์ตามวงจรที่มีตัวปล่อยทั่วไปพัลส์เอาท์พุตจะถูกลบออกจากโหลดตัวสะสมภายนอกของทรานซิสเตอร์ (จากพิน 8 และ 11 ของไมโครวงจร) และพัลส์นั้นจะถูกลดทิศทางลงจากระดับบวก (ส่วนนำ ขอบของพัลส์เป็นลบ) ตัวส่งสัญญาณของทรานซิสเตอร์ (พิน 9 และ 10 ของไมโครวงจร) ในกรณีนี้มักจะต่อสายดิน เมื่อเปิดสวิตช์ตามวงจรที่มีตัวสะสมทั่วไป โหลดภายนอกจะเชื่อมต่อกับตัวปล่อยของทรานซิสเตอร์และพัลส์เอาท์พุตในกรณีนี้จะถูกควบคุมโดยไฟกระชาก (ขอบนำของพัลส์เป็นบวก) จะถูกลบออกจากตัวปล่อยของ ทรานซิสเตอร์ VT1, VT2 ตัวสะสมของทรานซิสเตอร์เหล่านี้เชื่อมต่อกับพาวเวอร์บัสของชิปควบคุม (Upom)
พัลส์เอาท์พุตของหน่วยการทำงานที่เหลือซึ่งเป็นส่วนหนึ่งของส่วนดิจิตอลของไมโครวงจร TL494 จะถูกชี้ขึ้นด้านบนโดยไม่คำนึงถึงแผนภาพวงจรของไมโครวงจร
ทริกเกอร์ DD2 เป็นแบบฟลิปฟล็อป D แบบไดนามิกแบบกดดึง หลักการทำงานมีดังนี้ ที่ขอบนำ (บวก) ของพัลส์เอาท์พุตขององค์ประกอบ DD1 สถานะของอินพุต D ของฟลิปฟล็อป DD2 จะถูกเขียนไปยังรีจิสเตอร์ภายใน ตามทางกายภาพ นี่หมายความว่าฟลิปฟล็อปตัวแรกจากสองตัวที่รวมอยู่ใน DD2 จะถูกสลับ เมื่อพัลส์ที่เอาต์พุตขององค์ประกอบ DD1 สิ้นสุดลง ฟลิปฟล็อปตัวที่สองภายใน DD2 จะถูกสลับไปตามขอบตก (ลบ) ของพัลส์นี้ และสถานะของเอาต์พุต DD2 จะเปลี่ยนไป (ข้อมูลที่อ่านจากอินพุต D จะปรากฏที่เอาต์พุต Q) . วิธีนี้จะช่วยลดความเป็นไปได้ที่พัลส์ปลดล็อคจะปรากฏที่ฐานของทรานซิสเตอร์ VT1, VT2 แต่ละตัวสองครั้งในช่วงเวลาหนึ่ง ที่จริงแล้ว ตราบใดที่ระดับพัลส์ที่อินพุต C ของทริกเกอร์ DD2 ไม่เปลี่ยนแปลง สถานะของเอาท์พุตก็จะไม่เปลี่ยนแปลง ดังนั้นพัลส์จึงถูกส่งไปยังเอาต์พุตของไมโครวงจรผ่านช่องทางใดช่องหนึ่งเช่นช่องบน (DD3, DD5, VT1) เมื่อพัลส์ที่อินพุต C สิ้นสุดลง ให้ทริกเกอร์สวิตช์ DD2 ล็อคช่องด้านบนและปลดล็อคช่องด้านล่าง (DD4, DD6, VT2) ดังนั้นพัลส์ถัดไปที่มาถึงอินพุต C และอินพุต DD5, DD6 จะถูกส่งไปยังเอาต์พุตของไมโครวงจรผ่านช่องสัญญาณด้านล่าง ดังนั้นแต่ละพัลส์เอาท์พุตขององค์ประกอบ DD1 ซึ่งมีขอบลบ สวิตช์จะทริกเกอร์ DD2 และด้วยเหตุนี้จึงเปลี่ยนช่องทางการส่งผ่านของพัลส์ถัดไป ดังนั้น วัสดุอ้างอิงสำหรับวงจรไมโครควบคุมบ่งชี้ว่าสถาปัตยกรรมของวงจรไมโครมีการปราบปรามพัลส์สองเท่า เช่น กำจัดการปรากฏตัวของพัลส์ปลดล็อคสองตัวโดยอิงจากทรานซิสเตอร์ตัวเดียวกันในแต่ละช่วงเวลา
ให้เราพิจารณารายละเอียดช่วงหนึ่งของการทำงานของเส้นทางดิจิทัลของไมโครวงจร
การปรากฏตัวของพัลส์ปลดล็อคตามทรานซิสเตอร์เอาท์พุทของช่องบน (VT1) หรือล่าง (VT2) จะถูกกำหนดโดยตรรกะของการทำงานขององค์ประกอบ DD5, DD6 (“ 2OR-NOT”) และสถานะขององค์ประกอบ DD3 DD4 (“2AND”) ซึ่งในทางกลับกัน ถูกกำหนดโดยสถานะของทริกเกอร์ DD2
ตรรกะการทำงานขององค์ประกอบ 2-OR-NOT ดังที่ทราบกันดีอยู่แล้วก็คือแรงดันไฟฟ้าระดับสูง (โลจิคัล 1) ปรากฏที่เอาต์พุตขององค์ประกอบดังกล่าวในกรณีเดียวที่มีระดับแรงดันไฟฟ้าต่ำ (โลจิคัล 0) อยู่ที่ อินพุตทั้งสอง สำหรับการผสมสัญญาณอินพุตอื่นๆ ที่เป็นไปได้ เอาต์พุตขององค์ประกอบ 2 OR-NOT มีระดับแรงดันไฟฟ้าต่ำ (โลจิคัล 0) ดังนั้นหากที่เอาต์พุต Q ของทริกเกอร์ DD2 มีตรรกะ 1 (โมเมนต์ ti ของแผนภาพ 5 ในรูปที่ 13) และที่เอาต์พุต /Q มีตรรกะ 0 ดังนั้นที่อินพุตทั้งสองขององค์ประกอบ DD3 (2I ) จะมีตรรกะ 1 ดังนั้นตรรกะ 1 จะปรากฏที่เอาต์พุต DD3 และดังนั้นที่หนึ่งในอินพุตขององค์ประกอบ DD5 (2OR-NOT) ของช่องด้านบน ดังนั้นไม่ว่าระดับของสัญญาณที่มาถึงอินพุตที่สองขององค์ประกอบนี้จากเอาต์พุตขององค์ประกอบ DD1 สถานะของเอาต์พุต DD5 จะเป็นตรรกะ O และทรานซิสเตอร์ VT1 จะยังคงอยู่ในสถานะปิด สถานะเอาต์พุตขององค์ประกอบ DD4 จะเป็นตรรกะ 0 เพราะ โลจิคัล 0 มีอยู่ที่หนึ่งในอินพุตของ DD4 โดยมาจากเอาต์พุต /Q ของ flip-flop DD2 ลอจิก 0 จากเอาต์พุตขององค์ประกอบ DD4 ถูกส่งไปยังหนึ่งในอินพุตขององค์ประกอบ DD6 และทำให้พัลส์สามารถผ่านช่องด้านล่างได้ พัลส์ของขั้วบวกนี้ (ลอจิคัล 1) จะปรากฏที่เอาต์พุตของ DD6 และดังนั้นที่ฐานของ VT2 ระหว่างการหยุดชั่วคราวระหว่างพัลส์เอาท์พุตขององค์ประกอบ DD1 (เช่น สำหรับเวลาที่มีตรรกะ 0 ที่เอาต์พุตของ DD1 - ช่วงเวลา trt2 ของแผนภาพ 5 รูปที่ 13 ) ดังนั้นทรานซิสเตอร์ VT2 จะเปิดขึ้นและมีพัลส์ปรากฏบนตัวสะสมโดยดีดลงจากระดับบวก (หากเชื่อมต่อตามวงจรที่มีตัวปล่อยทั่วไป)
จุดเริ่มต้นของพัลส์เอาต์พุตถัดไปขององค์ประกอบ DD1 (โมเมนต์ t2 ของแผนภาพ 5 ในรูปที่ 13) จะไม่เปลี่ยนสถานะขององค์ประกอบของเส้นทางดิจิทัลของไมโครวงจร ยกเว้นองค์ประกอบ DD6 ที่เอาต์พุตที่ a ลอจิคัล 0 จะปรากฏขึ้น ดังนั้นทรานซิสเตอร์ VT2 จะปิดลง ความสมบูรณ์ของพัลส์เอาต์พุต DD1 (ช่วงเวลา ta) จะทำให้เกิดการเปลี่ยนแปลงในสถานะของเอาต์พุตของทริกเกอร์ DD2 ไปในทางตรงกันข้าม (โลจิคัล 0 - ที่เอาต์พุต Q, โลจิคัล 1 - ที่เอาต์พุต /Q) ดังนั้นสถานะของเอาต์พุตขององค์ประกอบ DD3, DD4 จะเปลี่ยน (ที่เอาต์พุตของ DD3 - โลจิคัล 0 ที่เอาต์พุตของ DD4 - โลจิคัล 1) การหยุดชั่วคราวที่เริ่มต้นในขณะนั้น!3 ที่เอาต์พุตขององค์ประกอบ DD1 จะทำให้สามารถเปิดทรานซิสเตอร์ VT1 ของช่องสัญญาณบนได้ ลอจิก 0 ที่เอาต์พุตขององค์ประกอบ DD3 จะ "ยืนยัน" ความเป็นไปได้นี้ โดยเปลี่ยนให้กลายเป็นลักษณะที่แท้จริงของพัลส์ปลดล็อคที่ใช้ทรานซิสเตอร์ VT1 แรงกระตุ้นนี้คงอยู่จนถึงช่วง U หลังจากนั้น VT1 จะปิดลงและกระบวนการจะถูกทำซ้ำ
ดังนั้นแนวคิดหลักของการทำงานของเส้นทางดิจิทัลของไมโครวงจรคือระยะเวลาของพัลส์เอาท์พุตที่พิน 8 และ 11 (หรือที่พิน 9 และ 10) ถูกกำหนดโดยระยะเวลาของการหยุดชั่วคราวระหว่าง พัลส์เอาท์พุตขององค์ประกอบ DD1 องค์ประกอบ DD3, DD4 กำหนดช่องทางสำหรับการส่งผ่านของพัลส์โดยใช้สัญญาณระดับต่ำ ลักษณะที่ปรากฏจะสลับกันที่เอาต์พุต Q และ /Q ของทริกเกอร์ DD2 ซึ่งควบคุมโดยองค์ประกอบเดียวกัน DD1 องค์ประกอบ DD5, DD6 เป็นวงจรจับคู่ระดับต่ำ
เพื่อให้คำอธิบายการทำงานของไมโครวงจรสมบูรณ์ควรสังเกตคุณสมบัติที่สำคัญอีกประการหนึ่ง ดังที่เห็นได้จากแผนภาพการทำงานในรูป อินพุตขององค์ประกอบ DD3, DD4 จะถูกรวมเข้าด้วยกันและเอาต์พุตไปที่พิน 13 ของไมโครวงจร ดังนั้นหากใช้ตรรกะ 1 กับพิน 13 องค์ประกอบ DD3, DD4 จะทำงานเป็นตัวทำซ้ำข้อมูลจากเอาต์พุต Q และ /Q ของทริกเกอร์ DD2 ในกรณีนี้องค์ประกอบ DD5, DD6 และทรานซิสเตอร์ VT1, VT2 จะเปลี่ยนโดยมีการเปลี่ยนเฟสครึ่งช่วงเพื่อให้แน่ใจว่าการทำงานของส่วนกำลังของ UPS สร้างขึ้นตามวงจรฮาล์ฟบริดจ์แบบกดดึง หากใช้ตรรกะ 0 กับพิน 13 องค์ประกอบ DD3, DD4 จะถูกบล็อกเช่น สถานะของเอาต์พุตขององค์ประกอบเหล่านี้จะไม่เปลี่ยนแปลง (ค่าตรรกะคงที่ 0) ดังนั้นพัลส์เอาท์พุตขององค์ประกอบ DD1 จะส่งผลต่อองค์ประกอบ DD5, DD6 ในลักษณะเดียวกัน องค์ประกอบ DD5, DD6 และทรานซิสเตอร์เอาต์พุต VT1, VT2 จะเปลี่ยนโดยไม่มีการเปลี่ยนเฟส (พร้อมกัน) โหมดการทำงานของไมโครวงจรควบคุมนี้จะใช้หากส่วนกำลังของ UPS ทำขึ้นตามวงจรรอบเดียว ในกรณีนี้ตัวสะสมและตัวปล่อยของทรานซิสเตอร์เอาท์พุตทั้งสองของไมโครวงจรจะรวมกันเพื่อเพิ่มพลังงาน
แรงดันไฟเอาท์พุตถูกใช้เป็นหน่วยลอจิคัล "แข็ง" ในวงจรพุชพูล
แหล่งที่มาภายในของชิป Uref (พิน 13 ของชิปรวมกับพิน 14)
ตอนนี้เรามาดูการทำงานของวงจรอะนาล็อกของไมโครวงจร
สถานะของเอาต์พุต DD1 ถูกกำหนดโดยสัญญาณเอาต์พุตของตัวเปรียบเทียบ PWM DA2 (แผนภาพ 4) ที่จ่ายให้กับหนึ่งในอินพุต DD1 สัญญาณเอาต์พุตของตัวเปรียบเทียบ DA1 (แผนภาพ 2) ที่จ่ายให้กับอินพุตที่สองของ DD1 ไม่ส่งผลกระทบต่อสถานะของเอาต์พุต DD1 ในการทำงานปกติ ซึ่งถูกกำหนดโดยพัลส์เอาต์พุตที่กว้างขึ้นของตัวเปรียบเทียบ PWM DA2
นอกจากนี้จากแผนภาพในรูปที่ 13 เป็นที่ชัดเจนว่าเมื่อระดับแรงดันไฟฟ้าเปลี่ยนแปลงที่อินพุตที่ไม่กลับด้านของตัวเปรียบเทียบ PWM (แผนภาพที่ 3) ความกว้างของพัลส์เอาท์พุตของไมโครวงจร (แผนภาพที่ 12, 13) เปลี่ยนแปลงตามสัดส่วน ในการทำงานปกติระดับแรงดันไฟฟ้าที่อินพุตที่ไม่กลับด้านของตัวเปรียบเทียบ PWM DA2 จะถูกกำหนดโดยแรงดันเอาต์พุตของแอมพลิฟายเออร์ข้อผิดพลาด DA3 เท่านั้น (เนื่องจากเกินแรงดันเอาต์พุตของแอมพลิฟายเออร์ DA4) ซึ่งขึ้นอยู่กับระดับของ สัญญาณตอบรับที่อินพุตที่ไม่กลับด้าน (พิน 1 ของไมโครวงจร) ดังนั้นเมื่อใช้สัญญาณป้อนกลับกับพิน 1 ของไมโครวงจร ความกว้างของพัลส์ควบคุมเอาต์พุตจะเปลี่ยนตามสัดส่วนการเปลี่ยนแปลงในระดับของสัญญาณป้อนกลับนี้ ซึ่งในทางกลับกันจะเปลี่ยนตามสัดส่วนการเปลี่ยนแปลงในระดับ ของแรงดันไฟขาออกของ UPS เนื่องจาก ข้อเสนอแนะมาจากที่นั่น
ช่วงเวลาระหว่างพัลส์เอาต์พุตที่พิน 8 และ 11 ของไมโครวงจร เมื่อปิดทั้งทรานซิสเตอร์เอาต์พุต VT1 และ VT2 เรียกว่า "โซนตาย"
ตัวเปรียบเทียบ DA1 เรียกว่าตัวเปรียบเทียบ "โซนตาย" เพราะ มันกำหนดระยะเวลาขั้นต่ำที่เป็นไปได้ มาอธิบายรายละเอียดเพิ่มเติมกันดีกว่า
จากแผนภาพเวลาในรูปที่ 13 ตามมาว่าหากความกว้างของพัลส์เอาท์พุตของตัวเปรียบเทียบ PWM DA2 ลดลงด้วยเหตุผลบางประการ จากนั้นเริ่มต้นจากความกว้างที่แน่นอนของพัลส์เหล่านี้ พัลส์เอาท์พุตของตัวเปรียบเทียบ DA1 จะกว้างกว่า พัลส์เอาต์พุตของตัวเปรียบเทียบ PWM DA2 และเริ่มกำหนดสถานะเอาต์พุตขององค์ประกอบลอจิคัล DD1 ดังนั้น ความกว้างของพัลส์เอาท์พุตของไมโครวงจร กล่าวอีกนัยหนึ่งตัวเปรียบเทียบ DA1 จะจำกัดความกว้างของพัลส์เอาท์พุตของไมโครเซอร์กิตที่ระดับสูงสุดที่แน่นอน ระดับขีดจำกัดถูกกำหนดโดยศักยภาพที่อินพุตที่ไม่กลับด้านของตัวเปรียบเทียบ DA1 (พิน 4 ของไมโครวงจร) ในสถานะคงที่ อย่างไรก็ตาม ในทางกลับกัน ศักย์ที่พิน 4 จะกำหนดช่วงการปรับความกว้างของพัลส์เอาท์พุตของไมโครวงจร เมื่อศักยภาพที่พิน 4 เพิ่มขึ้น ช่วงนี้ก็จะแคบลง ช่วงการปรับที่กว้างที่สุดจะได้มาเมื่อศักยภาพที่พิน 4 เป็น 0
อย่างไรก็ตาม ในกรณีนี้ มีอันตรายที่เกี่ยวข้องกับความจริงที่ว่าความกว้างของ "โซนตาย" อาจเท่ากับ 0 (ตัวอย่างเช่น ในกรณีที่กระแสไฟที่ใช้จาก UPS เพิ่มขึ้นอย่างมีนัยสำคัญ) ซึ่งหมายความว่าพัลส์ควบคุมที่พิน 8 และ 11 ของไมโครเซอร์กิตจะติดตามกันโดยตรง ดังนั้น จึงอาจเกิดสถานการณ์ที่เรียกว่า "ชั้นวางเสียหาย" ได้ อธิบายได้จากความเฉื่อยของพาวเวอร์ทรานซิสเตอร์ของอินเวอร์เตอร์ ซึ่งไม่สามารถเปิดและปิดได้ทันที ดังนั้นหากคุณใช้สัญญาณล็อคกับฐานของทรานซิสเตอร์ที่เปิดก่อนหน้านี้และสัญญาณปลดล็อคไปที่ฐานของทรานซิสเตอร์ปิด (เช่นโดยมี "โซนตาย") เป็นศูนย์ คุณจะได้รับสถานการณ์ที่ทรานซิสเตอร์ตัวหนึ่ง ยังไม่ปิด และอีกแห่งก็เปิดอยู่แล้ว จากนั้นเกิดการพังทลายตามขาตั้งทรานซิสเตอร์ของฮาล์ฟบริดจ์ซึ่งประกอบด้วยการไหลของกระแสผ่านผ่านทรานซิสเตอร์ทั้งสองตัว กระแสนี้ดังที่เห็นได้จากแผนภาพในรูป 5 ข้ามขดลวดปฐมภูมิของหม้อแปลงไฟฟ้าและใช้งานได้จริงไม่จำกัด การป้องกันปัจจุบันไม่ทำงานในกรณีนี้เพราะว่า กระแสไม่ไหลผ่านเซ็นเซอร์กระแส (ไม่แสดงในแผนภาพ การออกแบบและหลักการทำงานของเซ็นเซอร์กระแสที่ใช้จะกล่าวถึงรายละเอียดในหัวข้อต่อๆ ไป) ซึ่งหมายความว่าเซ็นเซอร์นี้ไม่สามารถส่งสัญญาณไปยังวงจรควบคุมได้ ดังนั้นกระแสที่ไหลผ่านถึงค่าที่สูงมากในช่วงเวลาสั้น ๆ สิ่งนี้นำไปสู่การเพิ่มขึ้นอย่างมากของพลังงานที่ปล่อยออกมาจากทรานซิสเตอร์กำลังและความล้มเหลวเกือบจะในทันที (โดยปกติจะพัง) นอกจากนี้ ไดโอดของบริดจ์ตัวเรียงกระแสกำลังอาจได้รับความเสียหายจากกระแสไหลเข้า กระบวนการนี้จบลงด้วยการเป่าฟิวส์เครือข่ายซึ่งเนื่องจากความเฉื่อยของมันจึงไม่มีเวลาในการปกป้ององค์ประกอบของวงจร แต่จะป้องกันเฉพาะเครือข่ายหลักจากการโอเวอร์โหลดเท่านั้น
ดังนั้นแรงดันไฟฟ้าควบคุม ที่จ่ายให้กับฐานของทรานซิสเตอร์กำลังจะต้องถูกสร้างขึ้นในลักษณะที่ทรานซิสเตอร์ตัวแรกถูกปิดอย่างน่าเชื่อถือจากนั้นจึงเปิดอีกตัวเท่านั้น กล่าวอีกนัยหนึ่ง ระหว่างพัลส์ควบคุมที่จ่ายให้กับฐานของทรานซิสเตอร์กำลังจะต้องมีการเปลี่ยนเวลาที่ไม่เท่ากับศูนย์ ("โซนตาย") ระยะเวลาขั้นต่ำที่อนุญาตของ "โซนตาย" จะถูกกำหนดโดยความเฉื่อยของทรานซิสเตอร์ที่ใช้เป็นสวิตช์ไฟ
สถาปัตยกรรมของไมโครวงจรช่วยให้คุณสามารถปรับระยะเวลาขั้นต่ำของ "โซนตาย" ได้โดยใช้ศักยภาพที่พิน 4 ของไมโครวงจร ศักยภาพนี้ตั้งค่าโดยใช้ตัวแบ่งภายนอกที่เชื่อมต่อกับบัสแรงดันเอาต์พุตของแหล่งอ้างอิงภายในของไมโครวงจร Uref
UPS บางเวอร์ชันไม่มีตัวแบ่งดังกล่าว ซึ่งหมายความว่าหลังจากกระบวนการซอฟต์สตาร์ทเสร็จสิ้น (ดูด้านล่าง) ศักยภาพที่พิน 4 ของไมโครวงจรจะเท่ากับ 0 ในกรณีเหล่านี้ ระยะเวลาขั้นต่ำที่เป็นไปได้ของ "โซนตาย" จะไม่เท่ากับ 0 แต่จะถูกกำหนดโดยแหล่งจ่ายแรงดันไฟฟ้าภายใน DA7 (0, 1B) ซึ่งเชื่อมต่อกับอินพุตที่ไม่กลับด้านของตัวเปรียบเทียบ DA1 ที่มีขั้วบวก และเพื่อพิน 4 ของไมโครวงจรที่มีขั้วลบ ดังนั้น ด้วยการรวมแหล่งที่มานี้ ความกว้างของพัลส์เอาท์พุตของตัวเปรียบเทียบ DA1 และดังนั้นความกว้างของ "โซนตาย" ไม่ว่าในสถานการณ์ใดจะไม่สามารถเท่ากับ 0 ได้ซึ่งหมายความว่า "การพังทลายตามชั้นวาง" จะเป็นไปไม่ได้โดยพื้นฐานแล้ว กล่าวอีกนัยหนึ่ง สถาปัตยกรรมของไมโครเซอร์กิตรวมถึงการจำกัดระยะเวลาสูงสุดของพัลส์เอาท์พุตของมัน (ระยะเวลาขั้นต่ำของ "โซนตาย") หากมีตัวแบ่งเชื่อมต่อกับพิน 4 ของไมโครวงจรจากนั้นหลังจากการสตาร์ทแบบนุ่มนวลศักยภาพของพินนี้ไม่เท่ากับ 0 ดังนั้นความกว้างของพัลส์เอาท์พุตของตัวเปรียบเทียบ DA1 ไม่เพียงถูกกำหนดโดยแหล่งภายใน DA7 เท่านั้น แต่ยังรวมถึงศักยภาพที่เหลือ (หลังจากเสร็จสิ้นกระบวนการซอฟต์สตาร์ท) ที่พิน 4 ด้วย อย่างไรก็ตาม ดังที่กล่าวไว้ข้างต้น ช่วงไดนามิกของการปรับความกว้างของตัวเปรียบเทียบ PWM DA2 นั้นแคบลง
แผนภาพเริ่มต้น
วงจรสตาร์ทได้รับการออกแบบมาเพื่อรับแรงดันไฟฟ้าที่สามารถใช้เพื่อจ่ายไฟให้กับไมโครวงจรควบคุมเพื่อสตาร์ทหลังจากเปิด IVP ไปยังเครือข่ายจ่ายไฟ ดังนั้นการเริ่มต้นระบบหมายถึงการเริ่มต้นวงจรไมโครควบคุมก่อน โดยไม่ทำให้การทำงานปกติของส่วนจ่ายไฟและวงจร UPS ทั้งหมดโดยรวมเป็นไปไม่ได้
วงจรสตาร์ทสามารถสร้างได้สองวิธี:
ด้วยการกระตุ้นตนเอง
ด้วยการบังคับกระตุ้น
ตัวอย่างเช่นมีการใช้วงจรกระตุ้นตัวเองใน UPS GT-150W (รูปที่ 14) แรงดันไฟฟ้าเครือข่ายที่แก้ไข Uep จะจ่ายให้กับตัวแบ่งตัวต้านทาน R5, R3, R6, R4 ซึ่งเป็นฐานสำหรับทรานซิสเตอร์คีย์เปิดปิดทั้งคู่ Q1, Q2 ดังนั้นผ่านทรานซิสเตอร์ภายใต้อิทธิพลของแรงดันไฟฟ้ารวมบนตัวเก็บประจุ C5, C6 (Uep) กระแสฐานเริ่มไหลผ่านวงจร (+)C5 - R5 - R7 - 6-e Q1 - R6 - R8 - 6 -e Q2 - "สายสามัญ" ของด้านหลัก - (-)C6
ทรานซิสเตอร์ทั้งสองตัวเปิดเล็กน้อยจากกระแสนี้ เป็นผลให้กระแสที่มีทิศทางตรงกันข้ามกันเริ่มไหลผ่านส่วนตัวสะสมและตัวปล่อยของทรานซิสเตอร์ทั้งสองตัวตามวงจร:
ถึง Q1: (+)C5 - +310 V บัส - Q1 - 5-6 T1 -1-2 T2-C9- (-)C5
ถึง Q2: (+)C6 - C9 - 2-1 T2 - 6-5 T1 - Q2 - "สายสามัญ" ของด้านหลัก - (-)C6

รูปที่ 14 แผนผังการเริ่มต้นระบบด้วยความตื่นเต้นในตัวเองของ UPS GT-150W
หากกระแสทั้งสองที่ไหลผ่านรอบเพิ่มเติม (เริ่มต้น) 5-6 T1 ในทิศทางตรงกันข้ามเท่ากัน ผลลัพธ์ที่ได้จะเป็น 0 และวงจรจะไม่สามารถสตาร์ทได้
อย่างไรก็ตามเนื่องจากการแพร่กระจายทางเทคโนโลยีของปัจจัยการขยายกระแสของทรานซิสเตอร์ Q1, Q2 กระแสใดกระแสหนึ่งเหล่านี้จะมากกว่ากระแสอื่นเสมอเพราะ ทรานซิสเตอร์จะเปิดออกเล็กน้อยตามองศาที่ต่างกัน ดังนั้นกระแสผลลัพธ์ที่ผ่านรอบ 5-6 T1 จึงไม่เท่ากับ 0 และมีทิศทางเดียวหรืออย่างอื่น สมมติว่ากระแสที่ไหลผ่านทรานซิสเตอร์ Q1 มีอิทธิพลเหนือกว่า (นั่นคือ Q1 เปิดมากกว่า Q2) ดังนั้นกระแสจะไหลในทิศทางจากพิน 5 ถึงพิน 6 ของ T1 การให้เหตุผลเพิ่มเติมขึ้นอยู่กับสมมติฐานนี้
อย่างไรก็ตาม ในความเป็นธรรม ควรสังเกตว่ากระแสที่ไหลผ่านทรานซิสเตอร์ Q2 อาจมีความโดดเด่นเช่นกัน จากนั้นกระบวนการทั้งหมดที่อธิบายไว้ด้านล่างจะเกี่ยวข้องกับทรานซิสเตอร์ Q2
การไหลของกระแสผ่านรอบ 5-6 ของ T1 ทำให้เกิด EMF ของการเหนี่ยวนำร่วมบนขดลวดทั้งหมดของหม้อแปลงควบคุม T1 ในกรณีนี้ (+) EMF เกิดขึ้นที่พิน 4 สัมพันธ์กับพิน 5 และกระแสเพิ่มเติมไหลเข้าสู่ฐาน Q1 ภายใต้อิทธิพลของ EMF นี้ โดยเปิดผ่านวงจรเล็กน้อย: 4 T1 - D7-R9-R7-6- 3 ไตรมาส 1 - 5 T1
ในเวลาเดียวกัน (-) EMF จะปรากฏที่พิน 7 ของ T1 สัมพันธ์กับพิน 8 เช่น ขั้วของ EMF นี้กลายเป็นการปิดกั้นสำหรับไตรมาสที่ 2 และปิดลง ต่อไป การตอบรับเชิงบวก (POF) จะเข้ามามีบทบาท ผลกระทบของมันคือเมื่อกระแสเพิ่มขึ้นผ่านส่วนตัวสะสม-ตัวปล่อย Q1 และเปลี่ยน 5-6 T1 EMF ที่เพิ่มขึ้นจะทำหน้าที่ในการคดเคี้ยว 4-5 T1 ซึ่งเมื่อสร้างกระแสฐานเพิ่มเติมสำหรับ Q1 จะเปิดขึ้นในระดับที่มากยิ่งขึ้น . กระบวนการนี้พัฒนาเหมือนหิมะถล่ม (เร็วมาก) และนำไปสู่การเปิด Q1 และการล็อค Q2 โดยสมบูรณ์ กระแสที่เพิ่มขึ้นเชิงเส้นเริ่มไหลผ่าน Q1 ที่เปิดและขดลวดปฐมภูมิ 1-2 ของหม้อแปลงพัลส์กำลัง T2 ซึ่งทำให้เกิดการปรากฏตัวของพัลส์ EMF ของการเหนี่ยวนำร่วมกันในขดลวดทั้งหมดของ T2 แรงกระตุ้นจากการพัน 7-5 T2 จะชาร์จความจุ C22 แรงดันไฟฟ้าปรากฏที่ C22 ซึ่งจ่ายเป็นแหล่งจ่ายให้กับพิน 12 ของชิปควบคุมประเภท TL494 IC1 และไปยังสเตจการจับคู่ วงจรไมโครเริ่มต้นและสร้างลำดับพัลส์สี่เหลี่ยมที่พิน 11, 8 ซึ่งสวิตช์ไฟ Q1, Q2 เริ่มสลับผ่านขั้นตอนการจับคู่ (Q3, Q4, T1) Pulse EMF ของระดับที่ระบุจะปรากฏบนขดลวดทั้งหมดของหม้อแปลงไฟฟ้า T2 ในกรณีนี้ EMF จากขดลวด 3-5 และ 7-5 จะป้อน C22 อย่างต่อเนื่องโดยรักษาระดับแรงดันไฟฟ้าให้คงที่ (ประมาณ +27V) กล่าวอีกนัยหนึ่ง Microcircuit เริ่มส่งกำลังตัวเองผ่านวงแหวนป้อนกลับ (ป้อนเอง) เครื่องเข้าสู่โหมดการทำงาน แรงดันไฟฟ้าของวงจรไมโครและสเตจการจับคู่เป็นตัวเสริม ทำหน้าที่ภายในบล็อกเท่านั้น และมักเรียกว่า Upom
วงจรนี้อาจมีการเปลี่ยนแปลงบางอย่าง เช่น ในแหล่งจ่ายไฟแบบสวิตชิ่ง LPS-02-150XT (ผลิตในไต้หวัน) สำหรับคอมพิวเตอร์ Mazovia SM1914 (รูปที่ 15) ในวงจรนี้ แรงกระตุ้นเริ่มต้นสำหรับการพัฒนากระบวนการเริ่มต้นจะได้รับโดยใช้วงจรเรียงกระแสครึ่งคลื่นแยก D1, C7 ซึ่งจ่ายกำลังให้กับตัวแบ่งตัวต้านทานพื้นฐานสำหรับสวิตช์ไฟในครึ่งวงจรบวกแรกของเครือข่าย สิ่งนี้ทำให้กระบวนการเริ่มต้นเร็วขึ้นเพราะ... การปลดล็อคครั้งแรกของปุ่มใดปุ่มหนึ่งเกิดขึ้นควบคู่ไปกับการชาร์จตัวเก็บประจุปรับให้เรียบความจุสูง มิฉะนั้น โครงการนี้จะทำงานในลักษณะเดียวกับที่กล่าวไว้ข้างต้น

รูปที่ 15 วงจรสตาร์ทแบบตื่นเต้นในตัวเองในแหล่งจ่ายไฟสลับ LPS-02-150XT
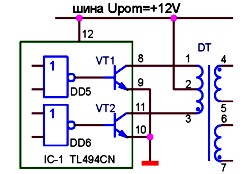
รูปแบบนี้ใช้ใน UPS PS-200B จาก LING YIN GROUP (ไต้หวัน)
ขดลวดปฐมภูมิของหม้อแปลงสตาร์ทพิเศษ T1 เปิดอยู่ที่ครึ่งหนึ่งของแรงดันไฟหลัก (ที่ค่าเล็กน้อย 220V) หรือที่แรงดันไฟฟ้าเต็ม (ที่ค่าเล็กน้อย 110V) สิ่งนี้ทำด้วยเหตุผลเพื่อให้แอมพลิจูดของแรงดันไฟฟ้ากระแสสลับบนขดลวดทุติยภูมิ T1 ไม่ขึ้นอยู่กับระดับของเครือข่ายจ่าย เมื่อเปิด UPS กระแสสลับจะไหลผ่านขดลวดปฐมภูมิ T1 ดังนั้นจึงเกิด EMF ไซน์สลับที่มีความถี่ของเครือข่ายจ่ายไฟบนขดลวดทุติยภูมิ 3-4 T1 กระแสที่ไหลภายใต้อิทธิพลของ EMF นี้จะถูกแก้ไขโดยวงจรบริดจ์พิเศษบนไดโอด D3-D6 และปรับให้เรียบด้วยตัวเก็บประจุ C26 แรงดันไฟฟ้าคงที่ประมาณ 10-11V จะถูกปล่อยออกมาที่ C26 ซึ่งจ่ายให้กับพิน 12 ของไมโครวงจรควบคุมประเภท TL494 U1 และไปยังสเตจการจับคู่ ควบคู่ไปกับกระบวนการนี้ ตัวเก็บประจุของตัวกรองการลดรอยหยักจะถูกชาร์จ ดังนั้นเมื่อถึงเวลาจ่ายไฟให้กับไมโครวงจร ระยะกำลังก็จะมีการรวมพลังงานด้วย วงจรไมโครเริ่มต้นและเริ่มสร้างลำดับของพัลส์สี่เหลี่ยมที่พิน 8, 11 ซึ่งสวิตช์ไฟเริ่มสลับผ่านขั้นตอนการจับคู่ เป็นผลให้แรงดันเอาต์พุตของบล็อกปรากฏขึ้น หลังจากเข้าสู่โหมดการป้อนด้วยตนเอง ไมโครเซอร์กิตจะถูกจ่ายไฟจากบัสแรงดันเอาต์พุต +12V ผ่านไดโอดดีคัปปลิ้ง D8 เนื่องจากแรงดันไฟฟ้าป้อนเองนี้สูงกว่าแรงดันเอาต์พุตของวงจรเรียงกระแส D3-D5 เล็กน้อย ไดโอดของวงจรเรียงกระแสเริ่มต้นนี้จึงถูกล็อค และจะไม่ส่งผลกระทบต่อการทำงานของวงจรในภายหลัง
ความจำเป็นในการป้อนกลับผ่านไดโอด D8 เป็นทางเลือก ในวงจร UPS บางวงจรที่ใช้การกระตุ้นแบบบังคับ จะไม่มีการเชื่อมต่อดังกล่าว ไมโครวงจรควบคุมและสเตจการจับคู่นั้นได้รับพลังงานจากเอาต์พุตของวงจรเรียงกระแสเริ่มต้นตลอดระยะเวลาการทำงาน อย่างไรก็ตาม ระดับระลอกคลื่นบนบัส Upom ในกรณีนี้จะสูงกว่าในกรณีของการจ่ายไฟให้กับวงจรขนาดเล็กจากบัสแรงดันเอาต์พุต +12V เล็กน้อย
เพื่อสรุปคำอธิบายของแผนการเปิดตัวเราสามารถสังเกตคุณสมบัติหลักของการก่อสร้างได้ ในวงจรที่ตื่นเต้นในตัวเอง ทรานซิสเตอร์กำลังจะถูกเปลี่ยนในตอนแรก ส่งผลให้เกิดแรงดันไฟฟ้าสำหรับชิป Upom ในวงจรที่มีการกระตุ้นแบบบังคับจะได้รับ Upom ก่อนและเป็นผลให้เปลี่ยนทรานซิสเตอร์กำลัง นอกจากนี้ ในวงจรที่ตื่นเต้นในตัวเอง แรงดันไฟฟ้าของอัพอมมักจะอยู่ที่ประมาณ +26V และในวงจรที่ตื่นเต้นด้วยตนเอง โดยทั่วไปจะอยู่ที่ประมาณ +12V
วงจรที่มีการกระตุ้นแบบบังคับ (พร้อมหม้อแปลงแยก) จะแสดงในรูปที่ 16

รูปที่ 16 วงจรสตาร์ทอัพพร้อมแรงกระตุ้นของแหล่งจ่ายไฟสลับ PS-200B (LING YIN GROUP)
การจับคู่น้ำตก
สเตจจับคู่ใช้เพื่อจับคู่และแยกสเตจเอาต์พุตกำลังสูงจากวงจรควบคุมกำลังต่ำ
รูปแบบการปฏิบัติสำหรับการสร้างน้ำตกที่ตรงกันใน UPS ต่างๆ สามารถแบ่งออกเป็นสองตัวเลือกหลัก:
รุ่นทรานซิสเตอร์ซึ่งใช้ทรานซิสเตอร์แยกภายนอกเป็นสวิตช์
เวอร์ชันที่ไม่มีทรานซิสเตอร์ซึ่งใช้ทรานซิสเตอร์เอาต์พุตของชิปควบคุมเอง VT1, VT2 (ในเวอร์ชันรวม) เป็นคีย์
นอกจากนี้ คุณลักษณะอีกประการหนึ่งที่สามารถจำแนกขั้นตอนการจับคู่ได้คือวิธีการควบคุมทรานซิสเตอร์กำลังของอินเวอร์เตอร์แบบฮาล์ฟบริดจ์ ตามคุณลักษณะนี้ การเรียงซ้อนที่ตรงกันทั้งหมดสามารถแบ่งออกเป็น:
น้ำตกที่มีการควบคุมร่วมกันโดยที่ทรานซิสเตอร์กำลังทั้งสองถูกควบคุมโดยใช้หม้อแปลงควบคุมทั่วไปหนึ่งตัวซึ่งมีขดลวดหลักหนึ่งเส้นและขดลวดทุติยภูมิสองเส้น
ลดหลั่นพร้อมการควบคุมแยกกัน โดยที่ทรานซิสเตอร์กำลังแต่ละตัวถูกควบคุมโดยใช้หม้อแปลงแยกกัน เช่น มีหม้อแปลงควบคุมสองตัวในขั้นตอนการจับคู่
จากการจำแนกทั้งสองประเภท การจับคู่น้ำตกสามารถทำได้ด้วยวิธีใดวิธีหนึ่งจากสี่วิธี:
ทรานซิสเตอร์ที่มีการควบคุมทั่วไป
ทรานซิสเตอร์ที่มีการควบคุมแยกต่างหาก
ไร้ทรานซิสเตอร์พร้อมการควบคุมทั่วไป
ไร้ทรานซิสเตอร์พร้อมการควบคุมแยกต่างหาก
สเตจของทรานซิสเตอร์ที่มีการควบคุมแยกกันนั้นไม่ค่อยได้ใช้หรือไม่ได้ใช้เลย ผู้เขียนไม่มีโอกาสที่จะพบกับน้ำตกที่เข้าคู่กันเช่นนี้ อีกสามตัวเลือกนั้นพบได้ทั่วไปไม่มากก็น้อย
ในทุกรุ่น การสื่อสารกับสเตจกำลังจะดำเนินการโดยใช้วิธีหม้อแปลงไฟฟ้า
ในกรณีนี้หม้อแปลงจะทำหน้าที่หลักสองประการ: การขยายสัญญาณควบคุมในรูปของกระแส (เนื่องจากการลดทอนแรงดันไฟฟ้า) และการแยกกระแสไฟฟ้า จำเป็นต้องมีการแยกกระแสไฟฟ้าเนื่องจากชิปควบคุมและสเตจจับคู่อยู่ที่ด้านทุติยภูมิ และสเตจกำลังอยู่ที่ด้านหลักของ UPS
ลองพิจารณาการทำงานของแต่ละตัวเลือกการเรียงซ้อนที่ตรงกันที่กล่าวถึงโดยใช้ตัวอย่างเฉพาะ
ในวงจรทรานซิสเตอร์ที่มีการควบคุมร่วมกันจะใช้เครื่องขยายกำลังพรีเพาเวอร์ของหม้อแปลงแบบพุชพูลบนทรานซิสเตอร์ Q3 และ Q4 เป็นสเตจจับคู่ (รูปที่ 17)

รูปที่ 17 ขั้นตอนการจับคู่ของแหล่งจ่ายไฟสลับ KYP-150W (วงจรทรานซิสเตอร์ที่มีการควบคุมทั่วไป)
รูปที่ 18 รูปร่างที่แท้จริงของพัลส์บนตัวสะสม
กระแสผ่านไดโอด D7 และ D9 ซึ่งไหลภายใต้อิทธิพลของพลังงานแม่เหล็กที่เก็บไว้ในแกน DT มีรูปแบบของเลขชี้กำลังที่สลายตัว ในแกน DT ในระหว่างการไหลของกระแสผ่านไดโอด D7 และ D9 ฟลักซ์แม่เหล็กที่เปลี่ยนแปลง (ตก) จะทำหน้าที่ซึ่งทำให้ปรากฏพัลส์ EMF บนขดลวดทุติยภูมิ
ไดโอด D8 กำจัดอิทธิพลของสเตจการจับคู่บนชิปควบคุมผ่านพาวเวอร์บัสทั่วไป
ขั้นตอนการจับคู่ทรานซิสเตอร์อีกประเภทหนึ่งพร้อมการควบคุมทั่วไปใช้ในแหล่งจ่ายไฟสลับ ESAN ESP-1003R (รูปที่ 19) คุณสมบัติแรกของตัวเลือกนี้คือรวมทรานซิสเตอร์เอาต์พุต VT1, VT2 ของไมโครวงจรไว้เป็นตัวติดตามตัวปล่อย สัญญาณเอาท์พุตจะถูกลบออกจากพิน 9 และ 10 ของไมโครวงจร ตัวต้านทาน R17, R16 และ R15, R14 เป็นโหลดตัวปล่อยของทรานซิสเตอร์ VT1 และ VT2 ตามลำดับ ตัวต้านทานชนิดเดียวกันนี้เป็นตัวแบ่งพื้นฐานสำหรับทรานซิสเตอร์ Q3, Q4 ซึ่งทำงานในโหมดสวิตช์ ความจุ C13 และ C12 กำลังบังคับและช่วยเร่งกระบวนการสวิตชิ่งของทรานซิสเตอร์ Q3, Q4 คุณสมบัติลักษณะที่สองของน้ำตกนี้คือขดลวดปฐมภูมิของหม้อแปลงควบคุม DT ไม่มีเอาต์พุตจากจุดกึ่งกลางและเชื่อมต่อระหว่างตัวสะสมของทรานซิสเตอร์ Q3, Q4 เมื่อทรานซิสเตอร์เอาต์พุต VT1 ของชิปควบคุมเปิดขึ้น ตัวแบ่ง R17, R16 ซึ่งเป็นฐานสำหรับทรานซิสเตอร์ Q3 จะถูกจ่ายพลังงานด้วยแรงดันไฟฟ้า Upom ดังนั้นกระแสจะไหลผ่านทางแยกควบคุม Q3 และจะเปิดขึ้น การเร่งความเร็วของกระบวนการนี้ได้รับการอำนวยความสะดวกโดยความจุบังคับ C13 ซึ่งจ่ายกระแสการปลดล็อคให้กับฐาน Q3 ซึ่งสูงกว่าค่าที่ตั้งไว้ 2-2.5 เท่า ผลลัพธ์ของการเปิด Q3 คือขดลวดปฐมภูมิ 1-2 DT เชื่อมต่อกับตัวเรือนด้วยพิน 1 เนื่องจากทรานซิสเตอร์ตัวที่สอง Q4 ถูกล็อค กระแสที่เพิ่มขึ้นเริ่มไหลผ่านขดลวดปฐมภูมิ DT ตามวงจร: Upom - R11 - 2-1 DT - Q3 - ตัวเรือน

รูปที่ 19. ขั้นการจับคู่ของสวิตชิ่งพาวเวอร์ซัพพลาย ESP-1003R ESAN ELECTRONIC CO., LTD (วงจรทรานซิสเตอร์ที่มีการควบคุมร่วมกัน)
พัลส์ EMF สี่เหลี่ยมปรากฏบนขดลวดทุติยภูมิ 3-4 และ 5-6 DT ทิศทางการพันของขดลวดทุติยภูมิ DT นั้นแตกต่างกัน ดังนั้นทรานซิสเตอร์กำลังตัวหนึ่ง (ไม่แสดงในแผนภาพ) จะได้รับพัลส์ฐานเปิด และอีกตัวหนึ่งจะได้รับพัลส์ปิด เมื่อ VT1 ของชิปควบคุมปิดอย่างรวดเร็ว Q3 ก็ปิดอย่างรวดเร็วหลังจากนั้นเช่นกัน การเร่งความเร็วของกระบวนการปิดได้รับการอำนวยความสะดวกโดยความจุบังคับ C13 ซึ่งเป็นแรงดันไฟฟ้าที่ใช้กับจุดเชื่อมต่อตัวปล่อยฐาน Q3 ในขั้วปิด จากนั้น "โซนตาย" จะคงอยู่เมื่อปิดทรานซิสเตอร์เอาต์พุตทั้งสองของไมโครวงจร ถัดไปทรานซิสเตอร์เอาต์พุต VT2 จะเปิดขึ้นซึ่งหมายความว่าตัวหาร R15, R14 ซึ่งเป็นฐานสำหรับทรานซิสเตอร์ตัวที่สอง Q4 นั้นขับเคลื่อนโดยแรงดันไฟฟ้า Upom ดังนั้น Q4 จะเปิดขึ้นและขดลวดปฐมภูมิ 1-2 DT เชื่อมต่อกับตัวเรือนที่ปลายอีกด้านหนึ่ง (พิน 2) ดังนั้นกระแสที่เพิ่มขึ้นจึงเริ่มไหลผ่านในทิศทางตรงกันข้ามกับเคสก่อนหน้าตามวงจร: Upom -R10 - 1-2 DT - Q4 - "เฟรม"
ดังนั้นขั้วของพัลส์บนขดลวดทุติยภูมิของ DT จึงเปลี่ยนไปและทรานซิสเตอร์กำลังตัวที่สองจะได้รับพัลส์เปิดและพัลส์ของขั้วปิดจะทำหน้าที่บนพื้นฐานของอันแรก เมื่อ VT2 ของชิปควบคุมปิดอย่างรวดเร็ว Q4 ก็ปิดอย่างรวดเร็วหลังจากนั้น (โดยใช้ความจุบังคับ C12) จากนั้น "โซนตาย" จะดำเนินต่อไปอีกครั้ง หลังจากนั้นกระบวนการจะทำซ้ำ
ดังนั้น แนวคิดหลักเบื้องหลังการทำงานของน้ำตกนี้คือสามารถรับฟลักซ์แม่เหล็กสลับในแกน DT ได้เนื่องจากการที่ DT ที่คดเคี้ยวปฐมภูมิเชื่อมต่อกับตัวเรือนที่ปลายด้านหนึ่งหรืออีกด้านหนึ่ง ดังนั้นกระแสสลับจึงไหลผ่านโดยไม่มีส่วนประกอบโดยตรงกับแหล่งจ่ายแบบขั้วเดียว
ในเวอร์ชันที่ไม่มีทรานซิสเตอร์ของสเตจการจับคู่ของ UPS ทรานซิสเตอร์เอาต์พุต VT1, VT2 ของไมโครวงจรควบคุมจะถูกใช้เป็นทรานซิสเตอร์ของสเตจการจับคู่ตามที่ระบุไว้ก่อนหน้า ในกรณีนี้ไม่มีทรานซิสเตอร์สเตจจับคู่แบบแยกส่วน
ตัวอย่างเช่น มีการใช้วงจรแบบไม่มีทรานซิสเตอร์ที่มีการควบคุมทั่วไปในวงจร UPS PS-200V ทรานซิสเตอร์เอาต์พุตของวงจรไมโคร VT1, VT2 จะถูกโหลดไปตามตัวสะสมโดยขดลวดครึ่งแรกของหม้อแปลง DT (รูปที่ 20) กำลังจ่ายไปที่จุดกึ่งกลางของขดลวดปฐมภูมิ DT
รูปที่ 20 ขั้นตอนการจับคู่ของแหล่งจ่ายไฟสลับ PS-200B (วงจรไร้ทรานซิสเตอร์ที่มีการควบคุมทั่วไป)
เมื่อทรานซิสเตอร์ VT1 เปิดขึ้น กระแสที่เพิ่มขึ้นจะไหลผ่านทรานซิสเตอร์นี้และหม้อแปลงควบคุม DT ที่คดเคี้ยวครึ่ง 1-2 พัลส์ควบคุมปรากฏบนขดลวดทุติยภูมิของ DT โดยมีขั้วที่ทรานซิสเตอร์กำลังของอินเวอร์เตอร์ตัวใดตัวหนึ่งเปิดและอีกอันปิด ในตอนท้ายของพัลส์ VT1 จะปิดอย่างรวดเร็วกระแสผ่านครึ่งขดลวด 1-2 DT หยุดไหลดังนั้น EMF บนขดลวดทุติยภูมิ DT จะหายไปซึ่งนำไปสู่การปิดทรานซิสเตอร์กำลัง ถัดไป "โซนตาย" จะคงอยู่เมื่อทรานซิสเตอร์เอาต์พุต VT1, VT2 ของไมโครวงจรปิดทั้งสองตัว และไม่มีกระแสไหลผ่านขดลวดปฐมภูมิ DT ถัดไปทรานซิสเตอร์ VT2 จะเปิดขึ้นและกระแสเพิ่มขึ้นเมื่อเวลาผ่านไปจะไหลผ่านทรานซิสเตอร์นี้และ 2-3 DT ที่คดเคี้ยวครึ่งหนึ่ง ฟลักซ์แม่เหล็กที่สร้างขึ้นโดยกระแสนี้ในแกน DT มีทิศทางตรงกันข้ามกับกรณีก่อนหน้า ดังนั้น EMF ของขั้วตรงข้ามกับเคสก่อนหน้าจึงถูกเหนี่ยวนำให้เกิดบนขดลวดทุติยภูมิ DT เป็นผลให้ทรานซิสเตอร์ตัวที่สองของอินเวอร์เตอร์ฮาล์ฟบริดจ์เปิดขึ้นและที่ฐานของตัวแรกพัลส์จะมีขั้วที่ปิด เมื่อ VT2 ของชิปควบคุมปิด กระแสที่ไหลผ่านและ DT ที่คดเคี้ยวหลักจะหยุดลง ดังนั้น EMF บนขดลวดทุติยภูมิ DT จะหายไปและทรานซิสเตอร์กำลังของอินเวอร์เตอร์จะปิดอีกครั้ง จากนั้น "โซนตาย" จะดำเนินต่อไปอีกครั้ง หลังจากนั้นกระบวนการจะทำซ้ำ
แนวคิดหลักของการสร้างน้ำตกนี้คือสามารถรับฟลักซ์แม่เหล็กสลับในแกนกลางของหม้อแปลงควบคุมได้โดยการจ่ายพลังงานให้กับจุดกึ่งกลางของขดลวดปฐมภูมิของหม้อแปลงนี้ ดังนั้นกระแสจึงไหลผ่านขดลวดครึ่งหนึ่งโดยมีจำนวนรอบเท่ากันในทิศทางที่ต่างกัน เมื่อทรานซิสเตอร์เอาท์พุตทั้งสองของไมโครวงจรปิด ("โซนตาย") ฟลักซ์แม่เหล็กในแกน DT จะเท่ากับ 0 การเปิดทรานซิสเตอร์สำรองทำให้เกิดลักษณะสลับของฟลักซ์แม่เหล็กในขดลวดครึ่งหนึ่ง ฟลักซ์แม่เหล็กที่เกิดขึ้นในแกนกลางจะแปรผัน
พันธุ์สุดท้ายเหล่านี้ (วงจรไร้ทรานซิสเตอร์ที่มีการควบคุมแยกกัน) ใช้ใน UPS ของคอมพิวเตอร์ Appis (เปรู) ในวงจรนี้มีหม้อแปลงควบคุมสองตัว DT1, DT2 ซึ่งครึ่งขดลวดปฐมภูมิเป็นโหลดสะสมสำหรับทรานซิสเตอร์เอาต์พุตของไมโครวงจร (รูปที่ 21) ในรูปแบบนี้สวิตช์ไฟทั้งสองสวิตช์แต่ละตัวจะถูกควบคุมผ่านหม้อแปลงแยกกัน กำลังจ่ายให้กับตัวสะสมของทรานซิสเตอร์เอาท์พุทของไมโครวงจรจากบัส Upom ทั่วไปผ่านจุดกึ่งกลางของขดลวดปฐมภูมิของหม้อแปลงควบคุม DT1, DT2
ไดโอด D9, D10 พร้อมส่วนที่เกี่ยวข้องของขดลวดปฐมภูมิ DT1, DT2 สร้างวงจรล้างอำนาจแม่เหล็กหลัก ลองดูปัญหานี้โดยละเอียด

รูปที่ 21 ขั้นตอนการจับคู่ของแหล่งจ่ายไฟสลับ "Appis" (วงจรไร้ทรานซิสเตอร์พร้อมการควบคุมแยกต่างหาก)
ขั้นตอนการจับคู่ (รูปที่ 21) นั้นเป็นตัวแปลงไปข้างหน้าแบบปลายเดี่ยวอิสระสองตัวเพราะว่า กระแสเปิดจะไหลเข้าสู่ฐานของทรานซิสเตอร์กำลังระหว่างสถานะเปิดของทรานซิสเตอร์ที่ตรงกันนั่นคือ ทรานซิสเตอร์ที่ตรงกันและทรานซิสเตอร์กำลังที่เชื่อมต่อผ่านหม้อแปลงไฟฟ้าจะเปิดพร้อมกัน ในกรณีนี้ พัลส์หม้อแปลงทั้งสอง DT1, DT2 ทำงานโดยมีส่วนประกอบคงที่ของกระแสขดลวดปฐมภูมิ เช่น ด้วยการบังคับแม่เหล็ก หากไม่ได้ใช้มาตรการพิเศษในการล้างอำนาจแม่เหล็กของแกนพวกเขาจะเข้าสู่ความอิ่มตัวของแม่เหล็กในช่วงการทำงานของคอนเวอร์เตอร์ซึ่งจะนำไปสู่การลดลงอย่างมากในการเหนี่ยวนำของขดลวดปฐมภูมิและความล้มเหลวของทรานซิสเตอร์สวิตชิ่ง VT1, VT2 พิจารณากระบวนการที่เกิดขึ้นในตัวแปลงบนทรานซิสเตอร์ VT1 และหม้อแปลง DT1 เมื่อทรานซิสเตอร์ VT1 เปิดขึ้นกระแสที่เพิ่มขึ้นเป็นเส้นตรงจะไหลผ่านและขดลวดปฐมภูมิ 1-2 DT1 ตามวงจร: Upom -2-1 DT1 - วงจร VT1 - "เคส"
เมื่อพัลส์ปลดล็อคที่ฐานของ VT1 สิ้นสุดลง มันจะปิดลงทันที กระแสผ่านขดลวด 1-2 DT1 หยุด อย่างไรก็ตาม EMF บนขดลวดล้างอำนาจแม่เหล็ก 2-3 DT1 จะเปลี่ยนขั้วและกระแส DT1 แกนล้างอำนาจแม่เหล็กจะไหลผ่านขดลวดนี้และไดโอด D10 ผ่านวงจร: 2 DT1 - Upom - C9 - "body" - D10-3DT1
กระแสนี้ลดลงเป็นเส้นตรงเช่น อนุพันธ์ของฟลักซ์แม่เหล็กผ่านแกน DT1 จะเปลี่ยนสัญญาณ และแกนจะถูกล้างอำนาจแม่เหล็ก ดังนั้นในระหว่างวงจรย้อนกลับนี้ พลังงานส่วนเกินที่เก็บไว้ในคอร์ DT1 ในระหว่างสถานะเปิดของทรานซิสเตอร์ VT1 จะถูกส่งกลับไปยังแหล่งกำเนิด (ตัวเก็บประจุ C9 ของบัส Upom จะถูกชาร์จใหม่)
อย่างไรก็ตาม ตัวเลือกนี้สำหรับการนำน้ำตกที่ตรงกันไปใช้นั้นเป็นวิธีที่นิยมน้อยที่สุดเพราะว่า หม้อแปลงทั้งสองรุ่น DT1, DT2 ทำงานโดยมีการใช้งานน้อยเกินไปในการเหนี่ยวนำและมีส่วนประกอบคงที่ของกระแสขดลวดปฐมภูมิ การกลับตัวของสนามแม่เหล็กของคอร์ DT1, DT2 เกิดขึ้นในวงจรส่วนตัว ครอบคลุมเฉพาะค่าการเหนี่ยวนำที่เป็นบวกเท่านั้น ด้วยเหตุนี้ฟลักซ์แม่เหล็กในแกนจึงเกิดการเต้นเป็นจังหวะเช่น มีส่วนประกอบคงที่ สิ่งนี้นำไปสู่พารามิเตอร์น้ำหนักและขนาดที่เพิ่มขึ้นของหม้อแปลง DT1, DT2 และนอกจากนี้เมื่อเปรียบเทียบกับตัวเลือกคาสเคดที่ตรงกันอื่น ๆ จำเป็นต้องใช้หม้อแปลงสองตัวที่นี่แทนที่จะเป็นตัวเดียว
โคลงนี้มีคุณสมบัติที่ดี, มีการปรับกระแสและแรงดันไฟฟ้าได้อย่างราบรื่น, เสถียรภาพที่ดี, ทนต่อการลัดวงจรโดยไม่มีปัญหา, ค่อนข้างง่ายและไม่ต้องการต้นทุนทางการเงินจำนวนมาก มีประสิทธิภาพสูงเนื่องจากหลักการทำงานของพัลส์ กระแสไฟขาออกสามารถเข้าถึงได้สูงสุด 15 แอมแปร์ ซึ่งจะช่วยให้คุณสร้างเครื่องชาร์จและแหล่งจ่ายไฟที่ทรงพลังด้วยกระแสและแรงดันไฟฟ้าที่ปรับได้ หากต้องการคุณสามารถเพิ่มกระแสเอาต์พุตเป็น 20 แอมแปร์หรือมากกว่าได้
บนอินเทอร์เน็ตของอุปกรณ์ที่คล้ายกันแต่ละเครื่องมีข้อดีและข้อเสียของตัวเอง แต่หลักการทำงานเหมือนกัน ตัวเลือกที่นำเสนอคือความพยายามที่จะสร้างโคลงที่เรียบง่ายและทรงพลังพอสมควร
ด้วยการใช้สวิตช์สนาม ทำให้สามารถเพิ่มความสามารถในการรับน้ำหนักของแหล่งกำเนิดได้อย่างมาก และลดความร้อนบนสวิตช์ไฟ ด้วยกระแสเอาต์พุตสูงถึง 4 แอมแปร์ จึงไม่จำเป็นต้องติดตั้งทรานซิสเตอร์และพาวเวอร์ไดโอดบนหม้อน้ำ
การให้คะแนนของส่วนประกอบบางอย่างบนแผนภาพอาจแตกต่างจากการให้คะแนนบนกระดาน เนื่องจาก ฉันพัฒนาบอร์ดตามความต้องการของฉันเอง
ช่วงการปรับแรงดันเอาต์พุตอยู่ที่ 2 ถึง 28 โวลต์ ในกรณีของฉันแรงดันไฟฟ้าสูงสุดคือ 22 โวลต์เพราะ ฉันใช้สวิตช์แรงดันต่ำและการเพิ่มแรงดันไฟฟ้าให้สูงกว่าค่านี้ถือเป็นความเสี่ยง แต่ด้วยแรงดันไฟฟ้าขาเข้าประมาณ 30 โวลต์ คุณสามารถรับแรงดันไฟฟ้าที่เอาต์พุตได้สูงสุด 28 โวลต์ ช่วงการปรับกระแสเอาต์พุตคือตั้งแต่ 60mA ถึง 15A แอมแปร์ ขึ้นอยู่กับความต้านทานของเซ็นเซอร์กระแสและองค์ประกอบกำลังของวงจร
อุปกรณ์ไม่กลัวไฟฟ้าลัดวงจร ขีด จำกัด ปัจจุบันก็ใช้งานได้
มีการประกอบแหล่งกำเนิดที่ใช้ตัวควบคุม PWM แล้ว ทีแอล494เอาต์พุตของไมโครเซอร์กิตจะเสริมด้วยไดรเวอร์สำหรับควบคุมสวิตช์ไฟ
ฉันอยากจะดึงความสนใจของคุณไปที่ธนาคารของตัวเก็บประจุที่ติดตั้งอยู่ที่เอาต์พุต ควรใช้ตัวเก็บประจุที่มีความต้านทานภายในต่ำ 40-50 โวลต์ โดยมีความจุรวม 3,000 ถึง 5,000 µF
ตัวต้านทานโหลดที่เอาต์พุตใช้เพื่อคายประจุตัวเก็บประจุเอาต์พุตอย่างรวดเร็ว หากไม่มีมัน โวลต์มิเตอร์การวัดที่เอาต์พุตจะทำงานโดยมีความล่าช้าเนื่องจาก เมื่อแรงดันเอาต์พุตลดลง ตัวเก็บประจุต้องใช้เวลาในการคายประจุ และตัวต้านทานนี้จะคายประจุอย่างรวดเร็ว จะต้องคำนวณความต้านทานของตัวต้านทานนี้ใหม่หากใช้แรงดันไฟฟ้าที่มากกว่า 24 โวลต์กับอินพุตของวงจร ตัวต้านทานมีขนาด 2 วัตต์ซึ่งออกแบบมาให้มีพลังงานสำรองทำให้สามารถอุ่นขึ้นระหว่างการทำงานได้ซึ่งเป็นเรื่องปกติ
มันทำงานอย่างไร:
ตัวควบคุม PWM สร้างพัลส์ควบคุมสำหรับสวิตช์ไฟ หากมีพัลส์ควบคุม ทรานซิสเตอร์และพลังงานผ่านช่องเปิดของทรานซิสเตอร์ผ่านตัวเหนี่ยวนำจะถูกส่งไปยังตัวเก็บประจุ อย่าลืมว่าตัวเหนี่ยวนำนั้นเป็นโหลดแบบเหนี่ยวนำซึ่งมีแนวโน้มที่จะสะสมพลังงานและเอาต์พุตเนื่องจากการเหนี่ยวนำในตัวเอง เมื่อทรานซิสเตอร์ปิด ประจุที่สะสมในตัวเหนี่ยวนำจะยังคงป้อนโหลดผ่านไดโอดชอตกี ในกรณีนี้ไดโอดจะเปิดขึ้นเนื่องจาก แรงดันไฟฟ้าจากตัวเหนี่ยวนำมีขั้วย้อนกลับ กระบวนการนี้จะทำซ้ำนับหมื่นครั้งต่อวินาที ขึ้นอยู่กับความถี่ในการทำงานของชิป PWM ในความเป็นจริงตัวควบคุม PWM จะตรวจสอบแรงดันไฟฟ้าบนตัวเก็บประจุเอาต์พุตเสมอ
ความเสถียรของแรงดันเอาต์พุตเกิดขึ้นดังนี้ อินพุตที่ไม่กลับด้านของแอมพลิฟายเออร์ข้อผิดพลาดแรกของวงจรไมโคร (พิน 1) ได้รับแรงดันเอาต์พุตของโคลงซึ่งจะถูกเปรียบเทียบกับแรงดันอ้างอิงซึ่งมีอยู่ที่อินพุตผกผันของแอมพลิฟายเออร์ข้อผิดพลาด เมื่อแรงดันเอาต์พุตลดลง แรงดันไฟฟ้าที่พิน 1 ก็จะลดลงด้วย และหากน้อยกว่าแรงดันอ้างอิง ตัวควบคุม PWM จะเพิ่มระยะเวลาพัลส์ ดังนั้น ทรานซิสเตอร์จะอยู่ในสถานะเปิดเป็นเวลานานขึ้นและกระแสไฟฟ้าจะมากขึ้น ถูกปั๊มเข้าไปในตัวเหนี่ยวนำหากแรงดันเอาต์พุตมากกว่าค่าอ้างอิง สิ่งตรงกันข้ามจะเกิดขึ้น - ไมโครเซอร์กิตจะลดระยะเวลาของพัลส์ควบคุม ตัวแบ่งที่ระบุสามารถเปลี่ยนแรงดันไฟฟ้าที่อินพุตที่ไม่กลับด้านของแอมพลิฟายเออร์ข้อผิดพลาดได้อย่างรุนแรงซึ่งจะเพิ่มหรือลดแรงดันเอาต์พุตของโคลงโดยรวม เพื่อให้การควบคุมแรงดันไฟฟ้าแม่นยำที่สุด จะใช้ตัวต้านทานแบบปรับค่าหลายรอบ แม้ว่าจะสามารถใช้ตัวต้านทานแบบปกติได้ก็ตาม
แรงดันเอาต์พุตขั้นต่ำคือประมาณ 2 โวลต์ซึ่งกำหนดโดยตัวแบ่งที่ระบุ หากต้องการคุณสามารถเล่นกับความต้านทานของตัวต้านทานเพื่อให้ได้ค่าที่ยอมรับได้สำหรับคุณ ไม่แนะนำให้ลดแรงดันไฟฟ้าขั้นต่ำให้ต่ำกว่า 1 โวลต์
มีการติดตั้ง shunt เพื่อตรวจสอบกระแสไฟฟ้าที่ใช้โดยโหลด ในการจัดระเบียบฟังก์ชันจำกัดกระแส จะใช้ตัวขยายข้อผิดพลาดตัวที่สองเป็นส่วนหนึ่งของตัวควบคุม Tl494 PWM แรงดันตกคร่อมวงจรสับเปลี่ยนจะถูกป้อนไปยังอินพุตที่ไม่กลับด้านของแอมพลิฟายเออร์ข้อผิดพลาดตัวที่สอง เมื่อเปรียบเทียบกับข้อมูลอ้างอิงอีกครั้ง จากนั้นสิ่งเดียวกันนี้จะเกิดขึ้นในกรณีของการรักษาเสถียรภาพแรงดันไฟฟ้า ตัวต้านทานที่ระบุสามารถใช้เพื่อควบคุมกระแสไฟขาออกได้
การแบ่งกระแสทำจากตัวต้านทานความต้านทานต่ำที่เชื่อมต่อแบบขนานสองตัวที่มีความต้านทาน 0.05 โอห์ม
โช้คจัดเก็บข้อมูลพันอยู่บนวงแหวนสีเหลือง-ขาวจากตัวกรองเสถียรภาพกลุ่มของแหล่งจ่ายไฟของคอมพิวเตอร์
เนื่องจากมีการวางแผนวงจรสำหรับกระแสอินพุตที่ค่อนข้างใหญ่จึงแนะนำให้ใช้วงแหวนสองวงพับเข้าหากัน ขดลวดเหนี่ยวนำประกอบด้วยลวดขนาดเส้นผ่านศูนย์กลาง 1.25 มม. จำนวน 20 รอบที่พันเป็นสองเส้นในฉนวนวานิชค่าความเหนี่ยวนำประมาณ 80-90 ไมโครเฮนรี